 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLightSAGE: Graph Neural Networks for Large Scale Item Retrieval in Shopee's Advertisement Recommendation
Oct 30, 2023Graph Neural Network (GNN) is the trending solution for item retrieval in recommendation problems. Most recent reports, however, focus heavily on new model architectures. This may bring some gaps when applying GNN in the industrial setup, where, besides the model, constructing the graph and handling data sparsity also play critical roles in the overall success of the project. In this work, we report how GNN is applied for large-scale e-commerce item retrieval at Shopee. We introduce our simple yet novel and impactful techniques in graph construction, modeling, and handling data skewness. Specifically, we construct high-quality item graphs by combining strong-signal user behaviors with high-precision collaborative filtering (CF) algorithm. We then develop a new GNN architecture named LightSAGE to produce high-quality items' embeddings for vector search. Finally, we design multiple strategies to handle cold-start and long-tail items, which are critical in an advertisement (ads) system. Our models bring improvement in offline evaluations, online A/B tests, and are deployed to the main traffic of Shopee's Recommendation Advertisement system.
S-AT GCN: Spatial-Attention Graph Convolution Network based Feature Enhancement for 3D Object Detection
Mar 15, 2021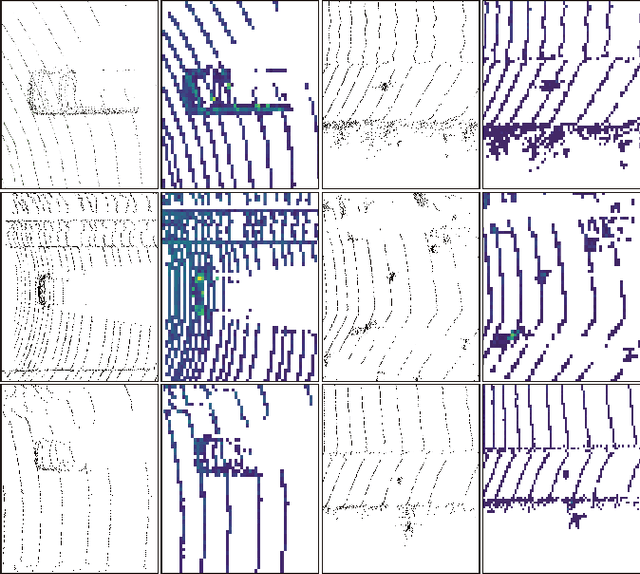

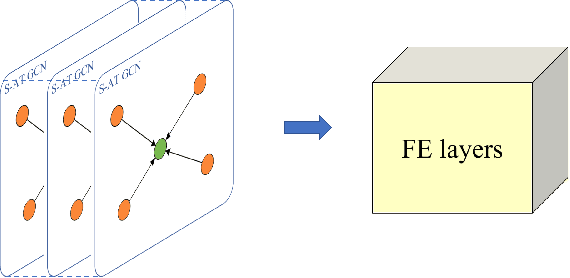
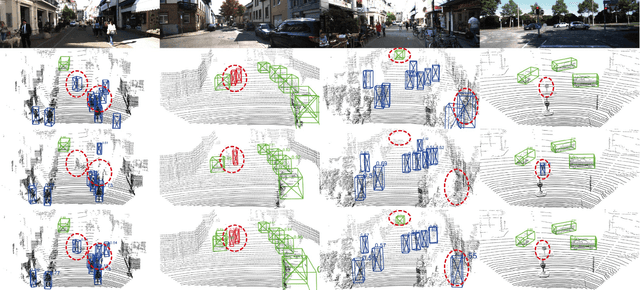
3D object detection plays a crucial role in environmental perception for autonomous vehicles, which is the prerequisite of decision and control. This paper analyses partition-based methods' inherent drawbacks. In the partition operation, a single instance such as a pedestrian is sliced into several pieces, which we call it the partition effect. We propose the Spatial-Attention Graph Convolution (S-AT GCN), forming the Feature Enhancement (FE) layers to overcome this drawback. The S-AT GCN utilizes the graph convolution and the spatial attention mechanism to extract local geometrical structure features. This allows the network to have more meaningful features for the foreground. Our experiments on the KITTI 3D object and bird's eye view detection show that S-AT Conv and FE layers are effective, especially for small objects. FE layers boost the pedestrian class performance by 3.62\% and cyclist class by 4.21\% 3D mAP. The time cost of these extra FE layers are limited. PointPillars with FE layers can achieve 48 PFS, satisfying the real-time requirement.
Multi-Agent Reinforcement Learning with Graph Clustering
Sep 28, 2020
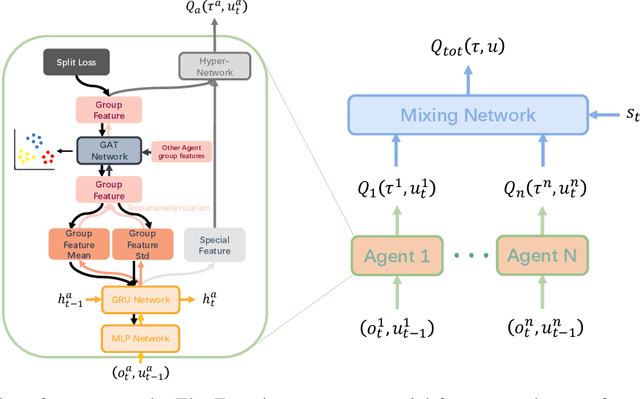
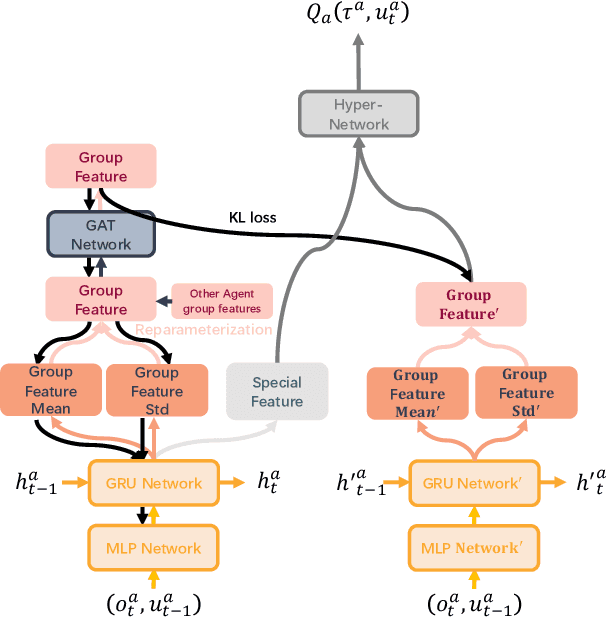
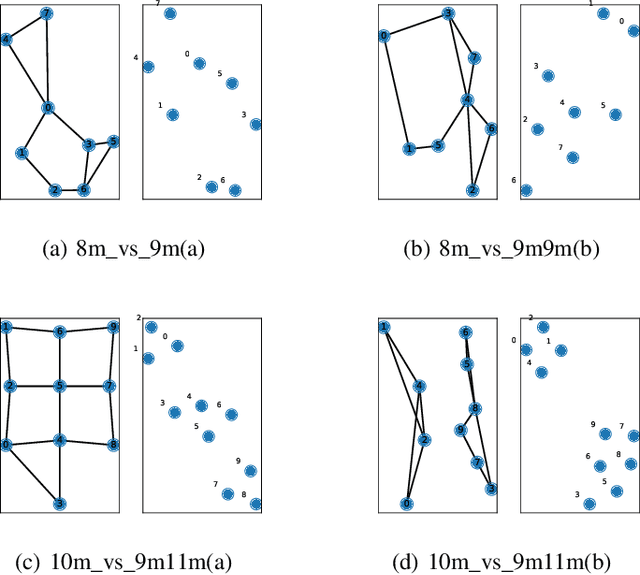
In this paper, the group concept is introduced into multi-agent reinforcement learning. Agents, in this method, are divided into several groups, each of which completes a specific subtask, cooperating to accomplish the main task. In order to exchange information between agents, present methods mainly use the communication vector; this can lead to communication redundancy. To solve this problem, a MARL based method is proposed on graph clustering. It allows agents to learn group features adaptively and replaces the communication operation. In this approach, agent features are divided into two types, including in-group and individual features. The generality and differences between agents are represented by them, respectively. Based on the graph attention network(GAT), the graph clustering method is introduced to optimize agent group feature. These features are then applied to generate individual Q value. The split loss is presented to distinguish agent features in order to overcome the consistent problem brought by GAT. The proposed method is easy to be converted into the CTDE framework by using the Kullback-Leibler divergence method. Empirical results are evaluated on a challenging set of StarCraft II micromanagement tasks. The result reveals that the proposed method achieves significant performance improvements in the SMAC domain, and can maintain a great performance with the increase in the number of agents.