 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Beginner's Guide to Power and Energy Measurement and Estimation for Computing and Machine Learning
Dec 11, 2024Concerns about the environmental footprint of machine learning are increasing. While studies of energy use and emissions of ML models are a growing subfield, most ML researchers and developers still do not incorporate energy measurement as part of their work practices. While measuring energy is a crucial step towards reducing carbon footprint, it is also not straightforward. This paper introduces the main considerations necessary for making sound use of energy measurement tools and interpreting energy estimates, including the use of at-the-wall versus on-device measurements, sampling strategies and best practices, common sources of error, and proxy measures. It also contains practical tips and real-world scenarios that illustrate how these considerations come into play. It concludes with a call to action for improving the state of the art of measurement methods and standards for facilitating robust comparisons between diverse hardware and software environments.
A Modular and Transferable Reinforcement Learning Framework for the Fleet Rebalancing Problem
May 27, 2021
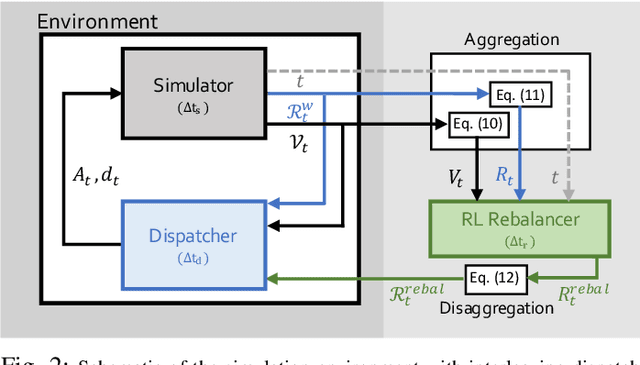
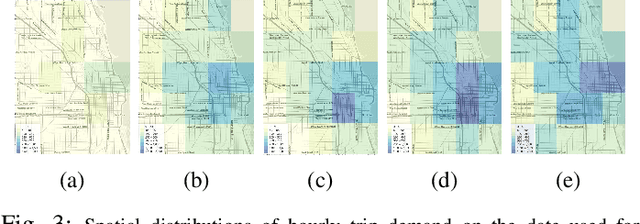
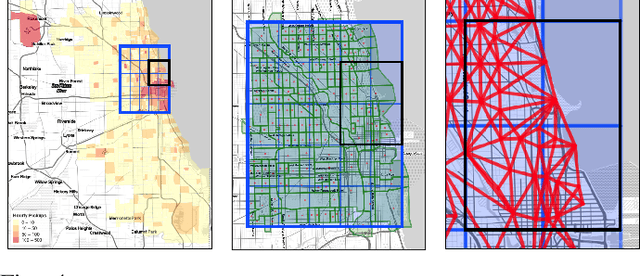
Mobility on demand (MoD) systems show great promise in realizing flexible and efficient urban transportation. However, significant technical challenges arise from operational decision making associated with MoD vehicle dispatch and fleet rebalancing. For this reason, operators tend to employ simplified algorithms that have been demonstrated to work well in a particular setting. To help bridge the gap between novel and existing methods, we propose a modular framework for fleet rebalancing based on model-free reinforcement learning (RL) that can leverage an existing dispatch method to minimize system cost. In particular, by treating dispatch as part of the environment dynamics, a centralized agent can learn to intermittently direct the dispatcher to reposition free vehicles and mitigate against fleet imbalance. We formulate RL state and action spaces as distributions over a grid partitioning of the operating area, making the framework scalable and avoiding the complexities associated with multiagent RL. Numerical experiments, using real-world trip and network data, demonstrate that this approach has several distinct advantages over baseline methods including: improved system cost; high degree of adaptability to the selected dispatch method; and the ability to perform scale-invariant transfer learning between problem instances with similar vehicle and request distributions.
Approximate Kalman Filter Q-Learning for Continuous State-Space MDPs
Sep 26, 2013

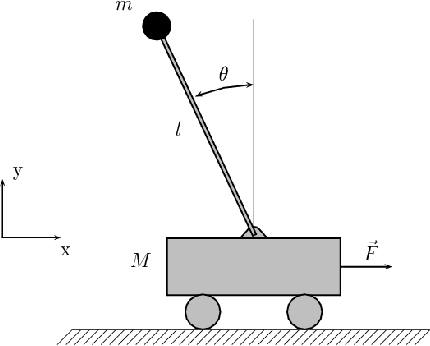

We seek to learn an effective policy for a Markov Decision Process (MDP) with continuous states via Q-Learning. Given a set of basis functions over state action pairs we search for a corresponding set of linear weights that minimizes the mean Bellman residual. Our algorithm uses a Kalman filter model to estimate those weights and we have developed a simpler approximate Kalman filter model that outperforms the current state of the art projected TD-Learning methods on several standard benchmark problems.