 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurrogate-assisted Multi-objective Neural Architecture Search for Real-time Semantic Segmentation
Aug 14, 2022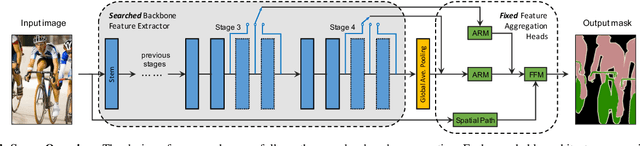
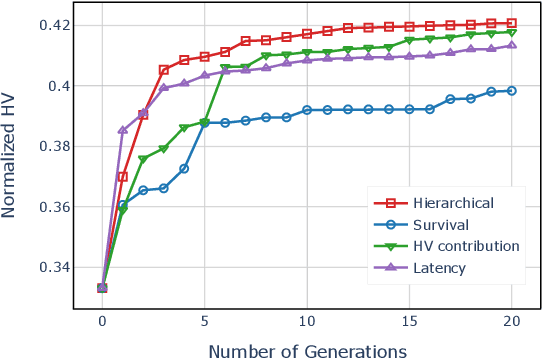
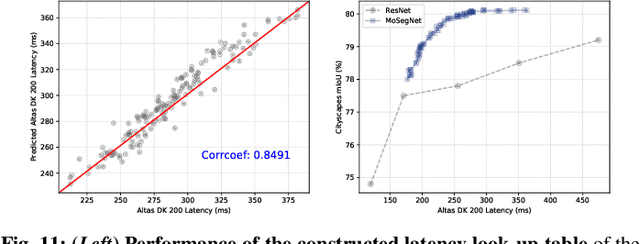
The architectural advancements in deep neural networks have led to remarkable leap-forwards across a broad array of computer vision tasks. Instead of relying on human expertise, neural architecture search (NAS) has emerged as a promising avenue toward automating the design of architectures. While recent achievements in image classification have suggested opportunities, the promises of NAS have yet to be thoroughly assessed on more challenging tasks of semantic segmentation. The main challenges of applying NAS to semantic segmentation arise from two aspects: (i) high-resolution images to be processed; (ii) additional requirement of real-time inference speed (i.e., real-time semantic segmentation) for applications such as autonomous driving. To meet such challenges, we propose a surrogate-assisted multi-objective method in this paper. Through a series of customized prediction models, our method effectively transforms the original NAS task into an ordinary multi-objective optimization problem. Followed by a hierarchical pre-screening criterion for in-fill selection, our method progressively achieves a set of efficient architectures trading-off between segmentation accuracy and inference speed. Empirical evaluations on three benchmark datasets together with an application using Huawei Atlas 200 DK suggest that our method can identify architectures significantly outperforming existing state-of-the-art architectures designed both manually by human experts and automatically by other NAS methods.
RelativeNAS: Relative Neural Architecture Search via Slow-Fast Learning
Sep 15, 2020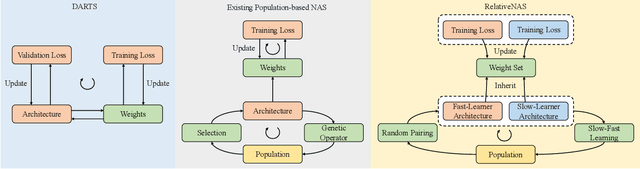
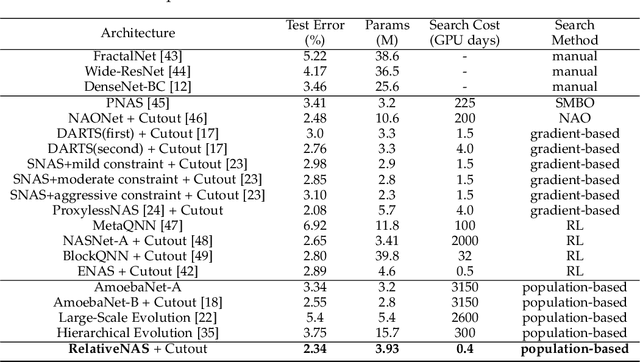
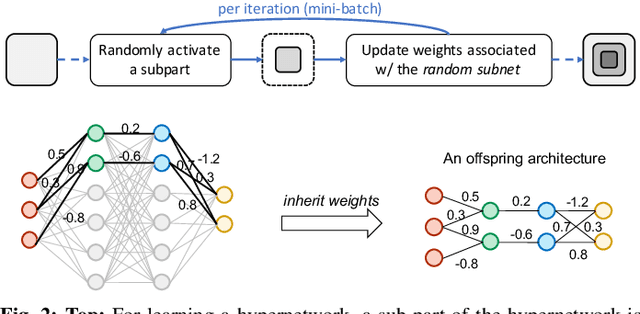
Despite the remarkable successes of Convolutional Neural Networks (CNNs) in computer vision, it is time-consuming and error-prone to manually design a CNN. Among various Neural Architecture Search (NAS) methods that are motivated to automate designs of high-performance CNNs, the differentiable NAS and population-based NAS are attracting increasing interests due to their unique characters. To benefit from the merits while overcoming the deficiencies of both, this work proposes a novel NAS method, RelativeNAS. As the key to efficient search, RelativeNAS performs joint learning between fast-learners (i.e. networks with relatively higher accuracy) and slow-learners in a pairwise manner. Moreover, since RelativeNAS only requires low-fidelity performance estimation to distinguish each pair of fast-learner and slow-learner, it saves certain computation costs for training the candidate architectures. The proposed RelativeNAS brings several unique advantages: (1) it achieves state-of-the-art performance on ImageNet with top-1 error rate of 24.88%, i.e. outperforming DARTS and AmoebaNet-B by 1.82% and 1.12% respectively; (2) it spends only nine hours with a single 1080Ti GPU to obtain the discovered cells, i.e. 3.75x and 7875x faster than DARTS and AmoebaNet respectively; (3) it provides that the discovered cells obtained on CIFAR-10 can be directly transferred to object detection, semantic segmentation, and keypoint detection, yielding competitive results of 73.1% mAP on PASCAL VOC, 78.7% mIoU on Cityscapes, and 68.5% AP on MSCOCO, respectively. The implementation of RelativeNAS is available at https://github.com/EMI-Group/RelativeNAS