 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmoSign: A Multimodal Dataset for Understanding Emotions in American Sign Language
May 20, 2025Unlike spoken languages where the use of prosodic features to convey emotion is well studied, indicators of emotion in sign language remain poorly understood, creating communication barriers in critical settings. Sign languages present unique challenges as facial expressions and hand movements simultaneously serve both grammatical and emotional functions. To address this gap, we introduce EmoSign, the first sign video dataset containing sentiment and emotion labels for 200 American Sign Language (ASL) videos. We also collect open-ended descriptions of emotion cues. Annotations were done by 3 Deaf ASL signers with professional interpretation experience. Alongside the annotations, we include baseline models for sentiment and emotion classification. This dataset not only addresses a critical gap in existing sign language research but also establishes a new benchmark for understanding model capabilities in multimodal emotion recognition for sign languages. The dataset is made available at https://huggingface.co/datasets/catfang/emosign.
Investigating Affective Use and Emotional Well-being on ChatGPT
Apr 04, 2025As AI chatbots see increased adoption and integration into everyday life, questions have been raised about the potential impact of human-like or anthropomorphic AI on users. In this work, we investigate the extent to which interactions with ChatGPT (with a focus on Advanced Voice Mode) may impact users' emotional well-being, behaviors and experiences through two parallel studies. To study the affective use of AI chatbots, we perform large-scale automated analysis of ChatGPT platform usage in a privacy-preserving manner, analyzing over 3 million conversations for affective cues and surveying over 4,000 users on their perceptions of ChatGPT. To investigate whether there is a relationship between model usage and emotional well-being, we conduct an Institutional Review Board (IRB)-approved randomized controlled trial (RCT) on close to 1,000 participants over 28 days, examining changes in their emotional well-being as they interact with ChatGPT under different experimental settings. In both on-platform data analysis and the RCT, we observe that very high usage correlates with increased self-reported indicators of dependence. From our RCT, we find that the impact of voice-based interactions on emotional well-being to be highly nuanced, and influenced by factors such as the user's initial emotional state and total usage duration. Overall, our analysis reveals that a small number of users are responsible for a disproportionate share of the most affective cues.
Enabling Waypoint Generation for Collaborative Robots using LLMs and Mixed Reality
Mar 14, 2024



Programming a robotic is a complex task, as it demands the user to have a good command of specific programming languages and awareness of the robot's physical constraints. We propose a framework that simplifies robot deployment by allowing direct communication using natural language. It uses large language models (LLM) for prompt processing, workspace understanding, and waypoint generation. It also employs Augmented Reality (AR) to provide visual feedback of the planned outcome. We showcase the effectiveness of our framework with a simple pick-and-place task, which we implement on a real robot. Moreover, we present an early concept of expressive robot behavior and skill generation that can be used to communicate with the user and learn new skills (e.g., object grasping).
Real-time Animation Generation and Control on Rigged Models via Large Language Models
Oct 27, 2023

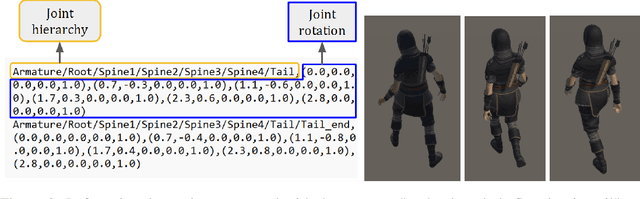

We introduce a novel method for real-time animation control and generation on rigged models using natural language input. First, we embed a large language model (LLM) in Unity to output structured texts that can be parsed into diverse and realistic animations. Second, we illustrate LLM's potential to enable flexible state transition between existing animations. We showcase the robustness of our approach through qualitative results on various rigged models and motions.
LLMR: Real-time Prompting of Interactive Worlds using Large Language Models
Sep 21, 2023



We present Large Language Model for Mixed Reality (LLMR), a framework for the real-time creation and modification of interactive Mixed Reality experiences using LLMs. LLMR leverages novel strategies to tackle difficult cases where ideal training data is scarce, or where the design goal requires the synthesis of internal dynamics, intuitive analysis, or advanced interactivity. Our framework relies on text interaction and the Unity game engine. By incorporating techniques for scene understanding, task planning, self-debugging, and memory management, LLMR outperforms the standard GPT-4 by 4x in average error rate. We demonstrate LLMR's cross-platform interoperability with several example worlds, and evaluate it on a variety of creation and modification tasks to show that it can produce and edit diverse objects, tools, and scenes. Finally, we conducted a usability study (N=11) with a diverse set that revealed participants had positive experiences with the system and would use it again.