 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGroup Surfing: A Pedestrian-Based Approach to Sidewalk Robot Navigation
Apr 13, 2021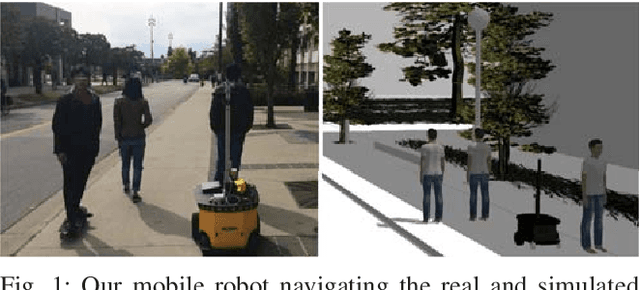
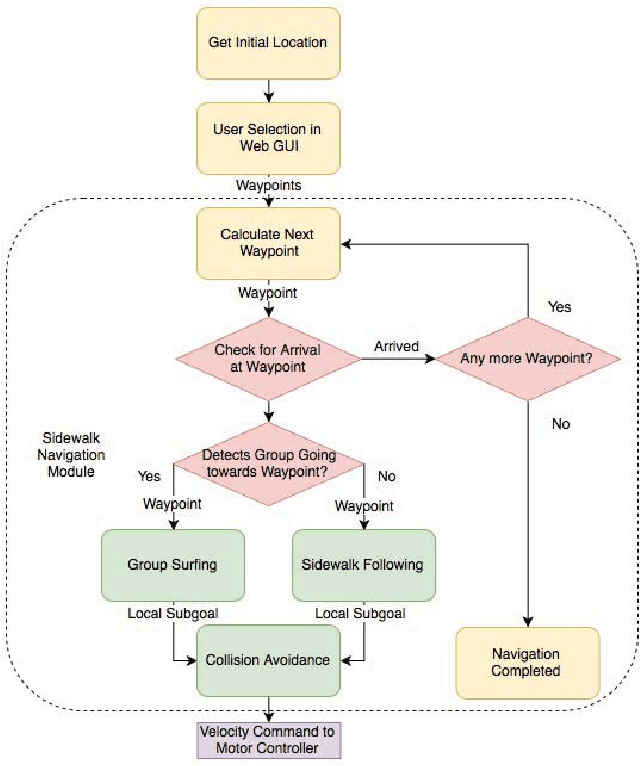
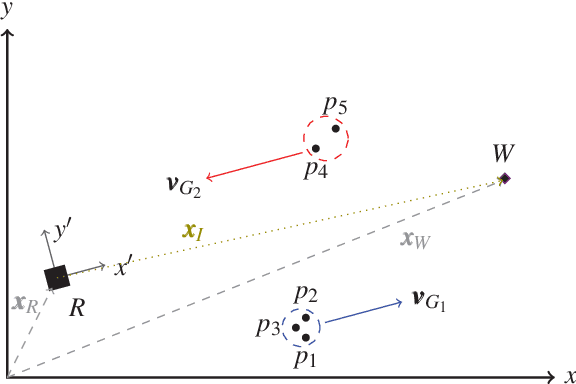
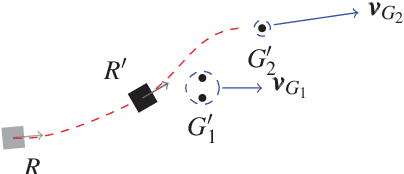
In this paper, we propose a novel navigation system for mobile robots in pedestrian-rich sidewalk environments. Sidewalks are unique in that the pedestrian-shared space has characteristics of both roads and indoor spaces. Like vehicles on roads, pedestrian movement often manifests as linear flows in opposing directions. On the other hand, pedestrians also form crowds and can exhibit much more random movements than vehicles. Classical algorithms are insufficient for safe navigation around pedestrians and remaining on the sidewalk space. Thus, our approach takes advantage of natural human motion to allow a robot to adapt to sidewalk navigation in a safe and socially-compliant manner. We developed a \textit{group surfing} method which aims to imitate the optimal pedestrian group for bringing the robot closer to its goal. For pedestrian-sparse environments, we propose a sidewalk edge detection and following method. Underlying these two navigation methods, the collision avoidance scheme is human-aware. The integrated navigation stack is evaluated and demonstrated in simulation. A hardware demonstration is also presented.
Real-Time Salient Closed Boundary Tracking via Line Segments Perceptual Grouping
Aug 09, 2017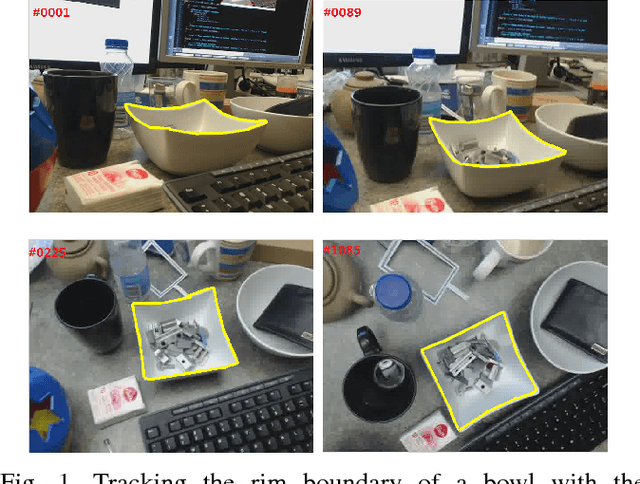
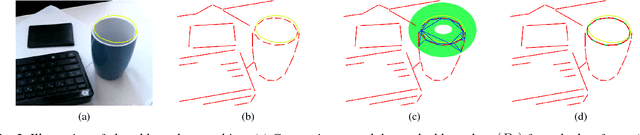
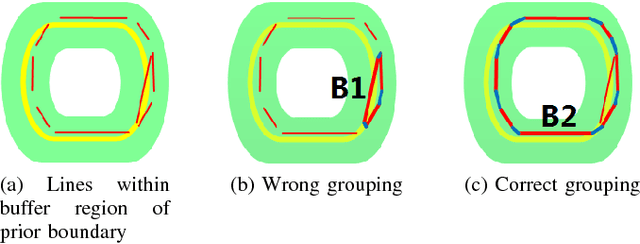
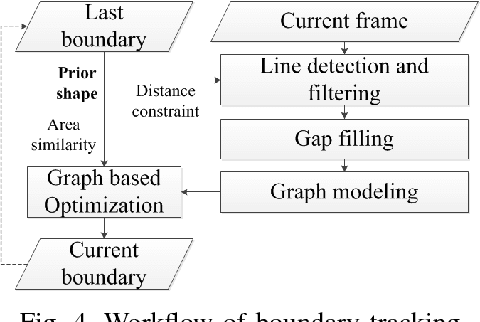
This paper presents a novel real-time method for tracking salient closed boundaries from video image sequences. This method operates on a set of straight line segments that are produced by line detection. The tracking scheme is coherently integrated into a perceptual grouping framework in which the visual tracking problem is tackled by identifying a subset of these line segments and connecting them sequentially to form a closed boundary with the largest saliency and a certain similarity to the previous one. Specifically, we define a new tracking criterion which combines a grouping cost and an area similarity constraint. The proposed criterion makes the resulting boundary tracking more robust to local minima. To achieve real-time tracking performance, we use Delaunay Triangulation to build a graph model with the detected line segments and then reduce the tracking problem to finding the optimal cycle in this graph. This is solved by our newly proposed closed boundary candidates searching algorithm called "Bidirectional Shortest Path (BDSP)". The efficiency and robustness of the proposed method are tested on real video sequences as well as during a robot arm pouring experiment.