 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGroup Surfing: A Pedestrian-Based Approach to Sidewalk Robot Navigation
Apr 13, 2021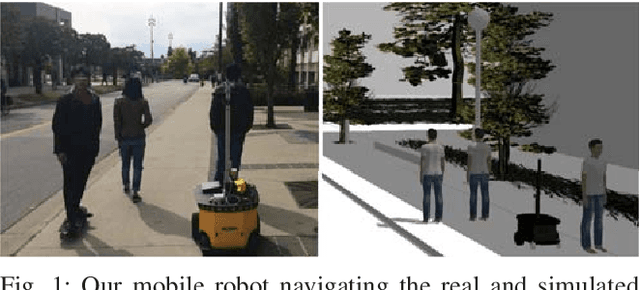
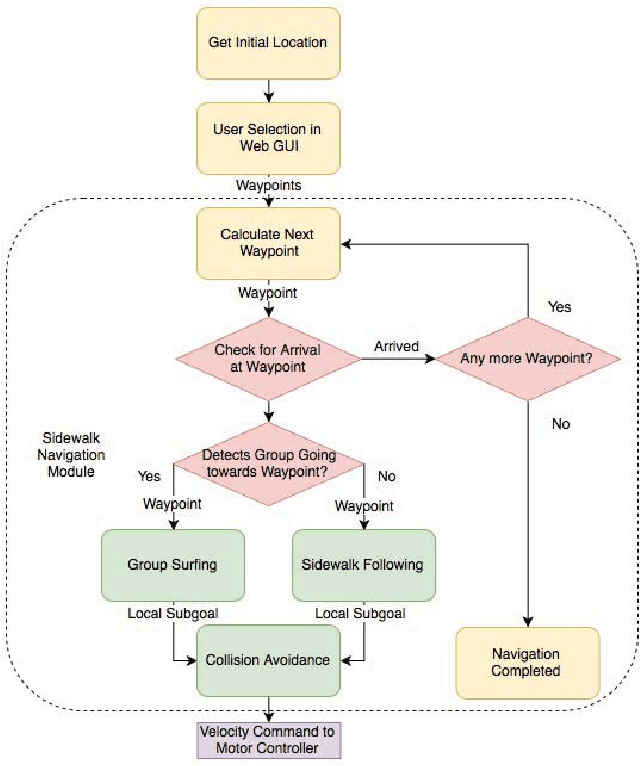
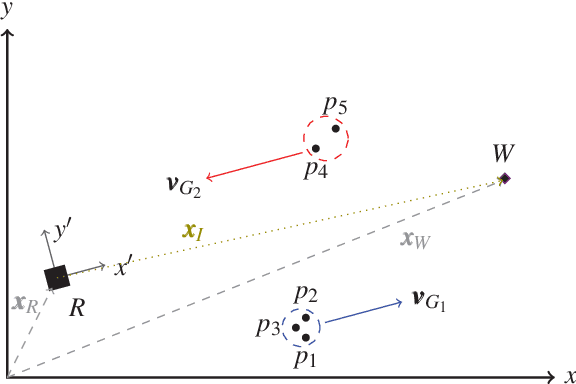
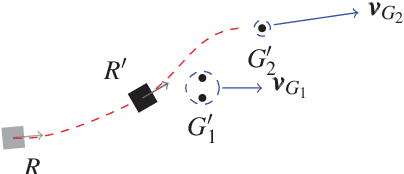
In this paper, we propose a novel navigation system for mobile robots in pedestrian-rich sidewalk environments. Sidewalks are unique in that the pedestrian-shared space has characteristics of both roads and indoor spaces. Like vehicles on roads, pedestrian movement often manifests as linear flows in opposing directions. On the other hand, pedestrians also form crowds and can exhibit much more random movements than vehicles. Classical algorithms are insufficient for safe navigation around pedestrians and remaining on the sidewalk space. Thus, our approach takes advantage of natural human motion to allow a robot to adapt to sidewalk navigation in a safe and socially-compliant manner. We developed a \textit{group surfing} method which aims to imitate the optimal pedestrian group for bringing the robot closer to its goal. For pedestrian-sparse environments, we propose a sidewalk edge detection and following method. Underlying these two navigation methods, the collision avoidance scheme is human-aware. The integrated navigation stack is evaluated and demonstrated in simulation. A hardware demonstration is also presented.
Mobile Robot Yielding Cues for Human-Robot Spatial Interaction
Apr 06, 2021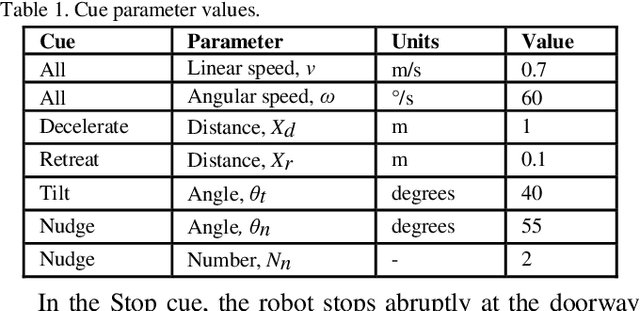
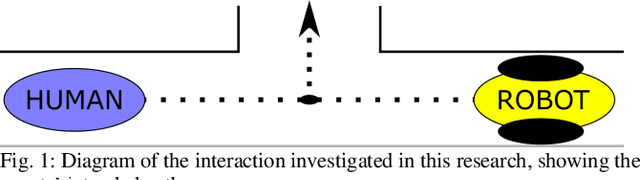
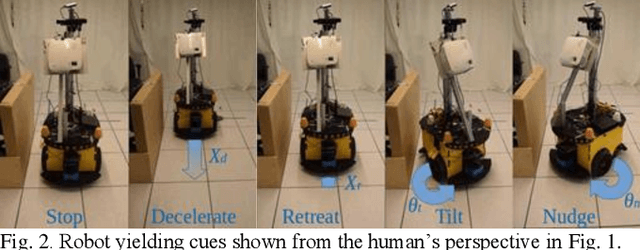
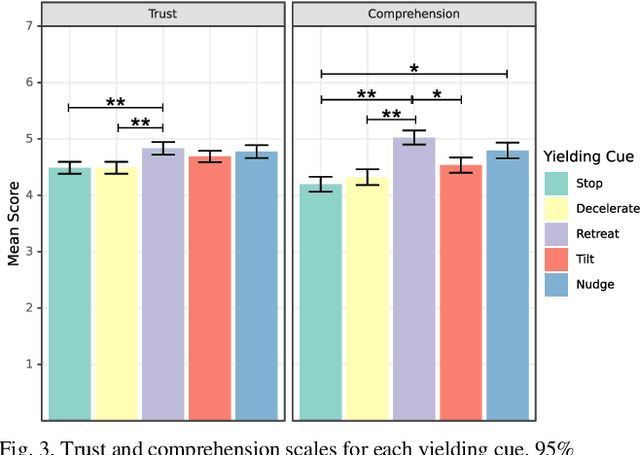
Mobile robots are increasingly being deployed in public spaces such as shopping malls, airports, and urban sidewalks. Most of these robots are designed with human-aware motion planning capabilities but are not designed to communicate with pedestrians. Pedestrians encounter these robots without prior understanding of the robots' behaviour, which can cause discomfort, confusion, and delayed social acceptance. In this research, we explore the common human-robot interaction at a doorway or bottleneck in a structured environment. We designed and evaluated communication cues used by a robot when yielding to a pedestrian in this scenario. We conducted an online user study with 102 participants using videos of a set of robot-to-human yielding cues. Results show that a Robot Retreating cue was the most socially acceptable cue. The results of this work help guide the development of mobile robots for public spaces.
Hey Robot, Which Way Are You Going? Nonverbal Motion Legibility Cues for Human-Robot Spatial Interaction
Apr 06, 2021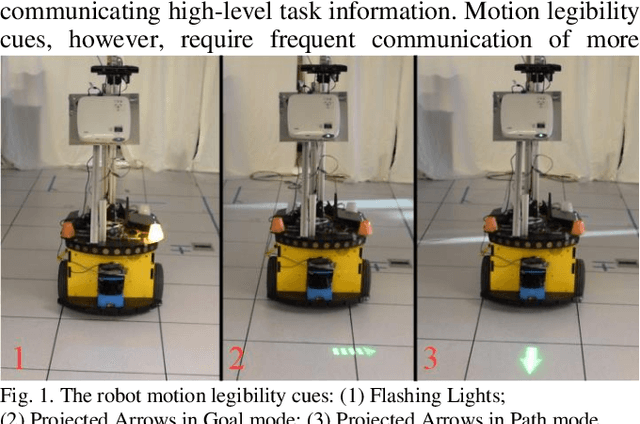
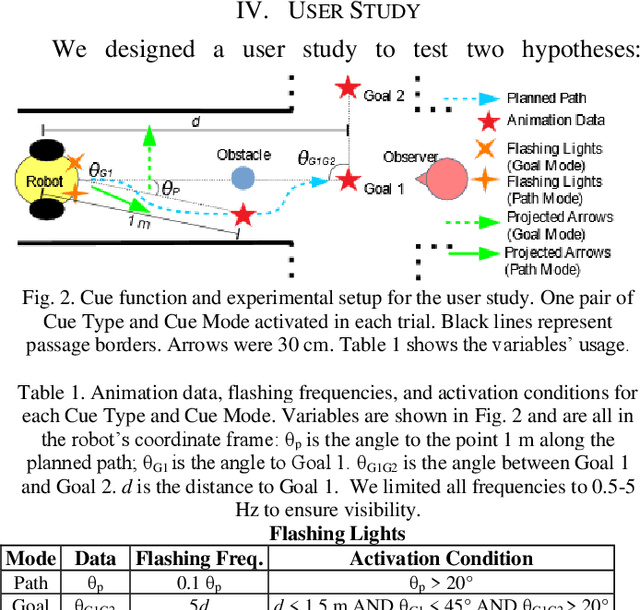
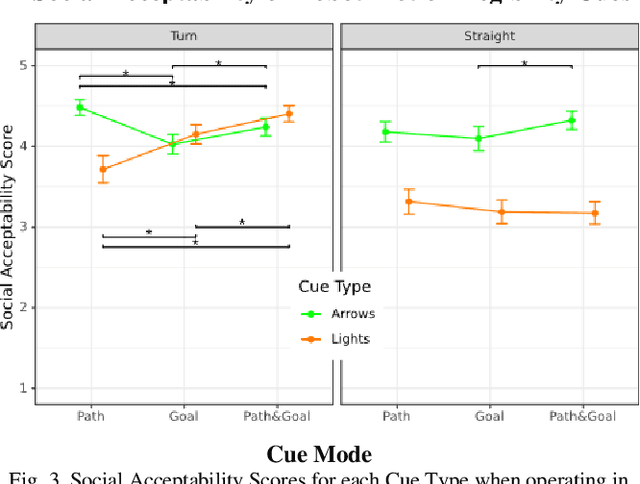
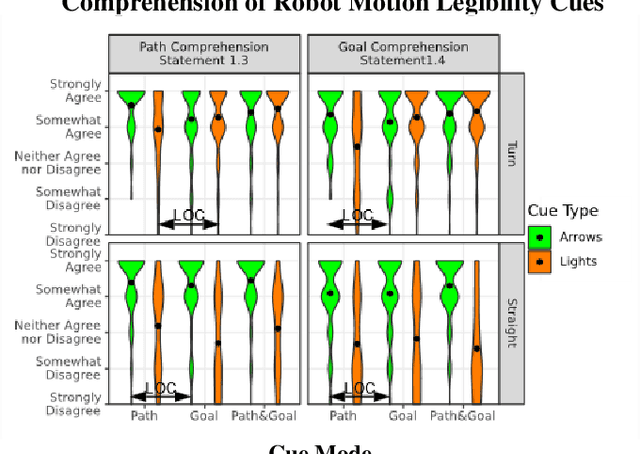
Mobile robots have recently been deployed in public spaces such as shopping malls, airports, and urban sidewalks. Most of these robots are designed with human-aware motion planning capabilities but are not designed to communicate with pedestrians. Pedestrians that encounter these robots without prior understanding of the robots' behaviour can experience discomfort, confusion, and delayed social acceptance. In this work we designed and evaluated nonverbal robot motion legibility cues, which communicate a mobile robot's motion intention to pedestrians. We compared a motion legibility cue using Projected Arrows to one using Flashing Lights. We designed the cues to communicate path information, goal information, or both, and explored different Robot Movement Scenarios. We conducted an online user study with 229 participants using videos of the motion legibility cues. Our results show that the absence of cues was not socially acceptable, and that Projected Arrows were the more socially acceptable cue in most experimental conditions. We conclude that the presence and choice of motion legibility cues can positively influence robots' acceptance and successful deployment in public spaces.