 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysically-Grounded Manifold Projection Model for Generalizable Metal Artifact Reduction in Dental CBCT
Jan 01, 2026Metal artifacts in Dental CBCT severely obscure anatomical structures, hindering diagnosis. Current deep learning for Metal Artifact Reduction (MAR) faces limitations: supervised methods suffer from spectral blurring due to "regression-to-the-mean", while unsupervised ones risk structural hallucinations. Denoising Diffusion Models (DDPMs) offer realism but rely on slow, stochastic iterative sampling, unsuitable for clinical use. To resolve this, we propose the Physically-Grounded Manifold Projection (PGMP) framework. First, our Anatomically-Adaptive Physics Simulation (AAPS) pipeline synthesizes high-fidelity training pairs via Monte Carlo spectral modeling and patient-specific digital twins, bridging the synthetic-to-real gap. Second, our DMP-Former adapts the Direct x-Prediction paradigm, reformulating restoration as a deterministic manifold projection to recover clean anatomy in a single forward pass, eliminating stochastic sampling. Finally, a Semantic-Structural Alignment (SSA) module anchors the solution using priors from medical foundation models (MedDINOv3), ensuring clinical plausibility. Experiments on synthetic and multi-center clinical datasets show PGMP outperforms state-of-the-art methods on unseen anatomy, setting new benchmarks in efficiency and diagnostic reliability. Code and data: https://github.com/ricoleehduu/PGMP.
Physically-Grounded Manifold Projection with Foundation Priors for Metal Artifact Reduction in Dental CBCT
Dec 30, 2025Metal artifacts in Dental CBCT severely obscure anatomical structures, hindering diagnosis. Current deep learning for Metal Artifact Reduction (MAR) faces limitations: supervised methods suffer from spectral blurring due to "regression-to-the-mean", while unsupervised ones risk structural hallucinations. Denoising Diffusion Models (DDPMs) offer realism but rely on slow, stochastic iterative sampling, unsuitable for clinical use. To resolve this, we propose the Physically-Grounded Manifold Projection (PGMP) framework. First, our Anatomically-Adaptive Physics Simulation (AAPS) pipeline synthesizes high-fidelity training pairs via Monte Carlo spectral modeling and patient-specific digital twins, bridging the synthetic-to-real gap. Second, our DMP-Former adapts the Direct x-Prediction paradigm, reformulating restoration as a deterministic manifold projection to recover clean anatomy in a single forward pass, eliminating stochastic sampling. Finally, a Semantic-Structural Alignment (SSA) module anchors the solution using priors from medical foundation models (MedDINOv3), ensuring clinical plausibility. Experiments on synthetic and multi-center clinical datasets show PGMP outperforms state-of-the-art methods on unseen anatomy, setting new benchmarks in efficiency and diagnostic reliability. Code and data: https://github.com/ricoleehduu/PGMP
GNN-ACLP: Graph Neural Networks based Analog Circuit Link Prediction
Apr 14, 2025Circuit link prediction identifying missing component connections from incomplete netlists is crucial in automating analog circuit design. However, existing methods face three main challenges: 1) Insufficient use of topological patterns in circuit graphs reduces prediction accuracy; 2) Data scarcity due to the complexity of annotations hinders model generalization; 3) Limited adaptability to various netlist formats. We propose GNN-ACLP, a Graph Neural Networks (GNNs) based framework featuring three innovations to tackle these challenges. First, we introduce the SEAL (Subgraphs, Embeddings, and Attributes for Link Prediction) framework and achieve port-level accuracy in circuit link prediction. Second, we propose Netlist Babel Fish, a netlist format conversion tool leveraging retrieval-augmented generation (RAG) with large language model (LLM) to enhance the compatibility of netlist formats. Finally, we construct SpiceNetlist, a comprehensive dataset that contains 775 annotated circuits across 10 different classes of components. The experimental results demonstrate an improvement of 15.05% on the SpiceNetlist dataset and 12.01% on the Image2Net dataset over the existing approach.
I3DOL: Incremental 3D Object Learning without Catastrophic Forgetting
Dec 16, 2020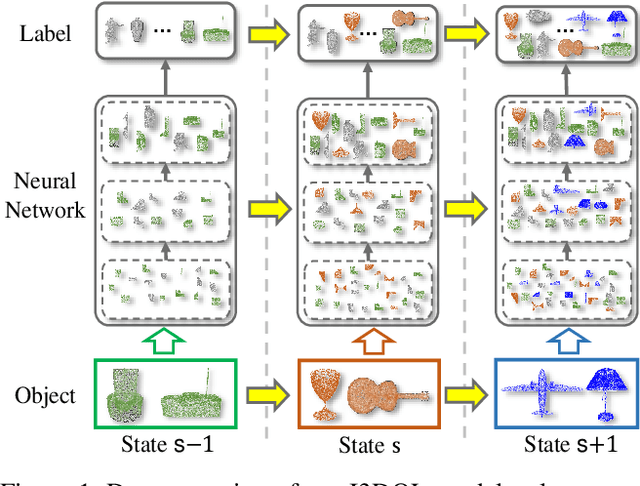
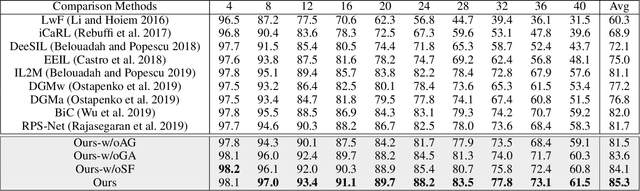
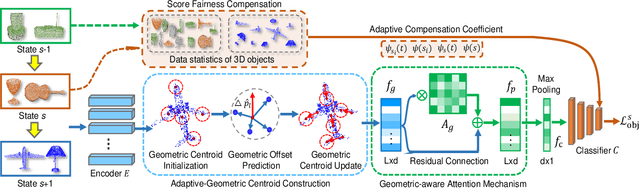

3D object classification has attracted appealing attentions in academic researches and industrial applications. However, most existing methods need to access the training data of past 3D object classes when facing the common real-world scenario: new classes of 3D objects arrive in a sequence. Moreover, the performance of advanced approaches degrades dramatically for past learned classes (i.e., catastrophic forgetting), due to the irregular and redundant geometric structures of 3D point cloud data. To address these challenges, we propose a new Incremental 3D Object Learning (i.e., I3DOL) model, which is the first exploration to learn new classes of 3D object continually. Specifically, an adaptive-geometric centroid module is designed to construct discriminative local geometric structures, which can better characterize the irregular point cloud representation for 3D object. Afterwards, to prevent the catastrophic forgetting brought by redundant geometric information, a geometric-aware attention mechanism is developed to quantify the contributions of local geometric structures, and explore unique 3D geometric characteristics with high contributions for classes incremental learning. Meanwhile, a score fairness compensation strategy is proposed to further alleviate the catastrophic forgetting caused by unbalanced data between past and new classes of 3D object, by compensating biased prediction for new classes in the validation phase. Experiments on 3D representative datasets validate the superiority of our I3DOL framework.
An End-to-End Geometric Deficiency Elimination Algorithm for 3D Meshes
Mar 14, 2020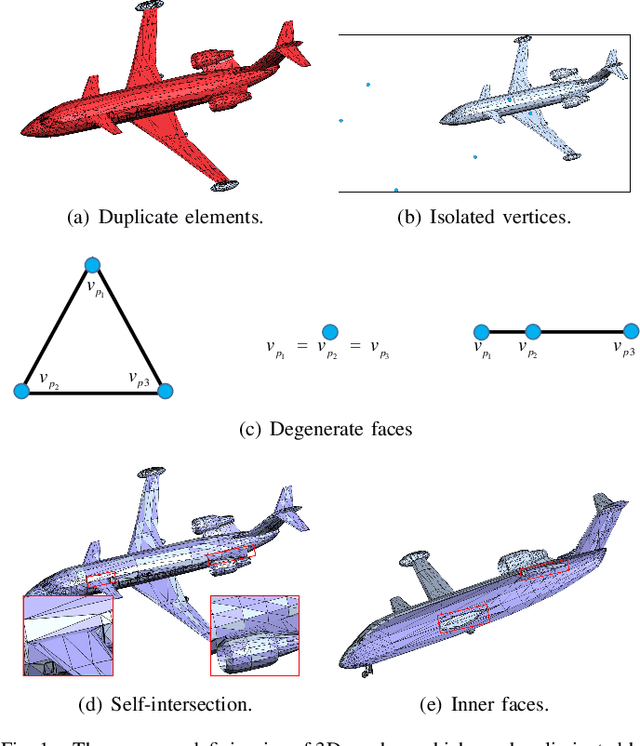
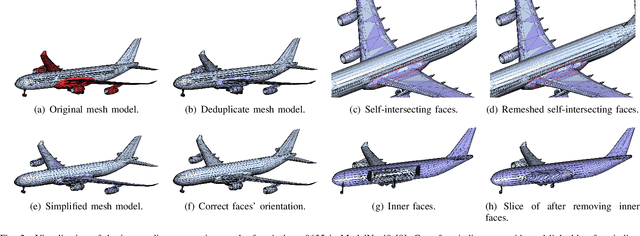
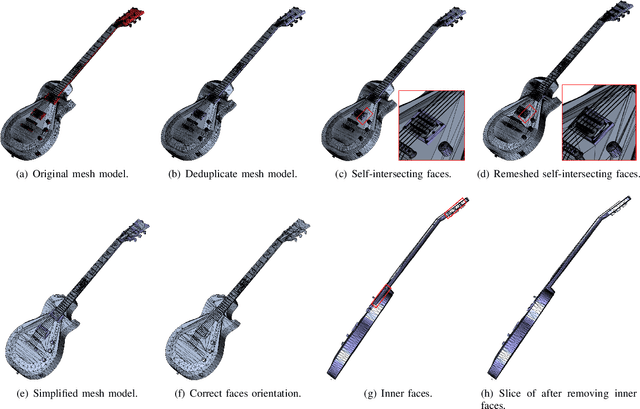
The 3D mesh is an important representation of geometric data. In the generation of mesh data, geometric deficiencies (e.g., duplicate elements, degenerate faces, isolated vertices, self-intersection, and inner faces) are unavoidable and may violate the topology structure of an object. In this paper, we propose an effective and efficient geometric deficiency elimination algorithm for 3D meshes. Specifically, duplicate elements can be eliminated by assessing the occurrence times of vertices or faces, degenerate faces can be removed according to the outer product of two edges; since isolated vertices do not appear in any face vertices, they can be deleted directly; self-intersecting faces are detected using an AABB tree and remeshed afterward; by simulating whether multiple random rays that shoot from a face can reach infinity, we can judge whether the surface is an inner face, then decide to delete it or not. Experiments on ModelNet40 dataset illustrate that our method can eliminate the deficiencies of the 3D mesh thoroughly.