 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Trajectory Fields for Dynamic Novel View Synthesis
May 12, 2021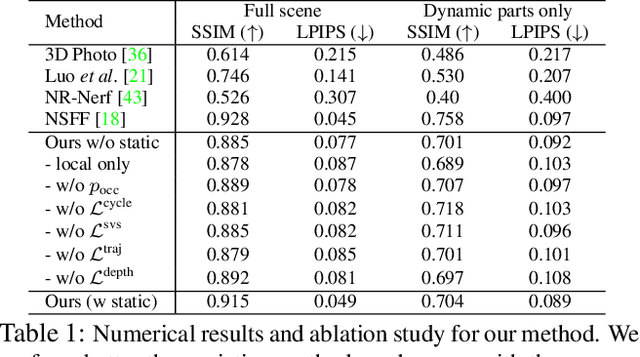

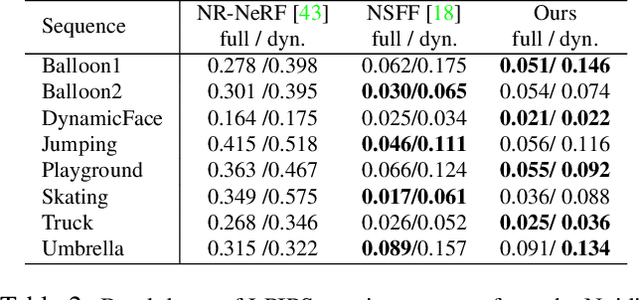
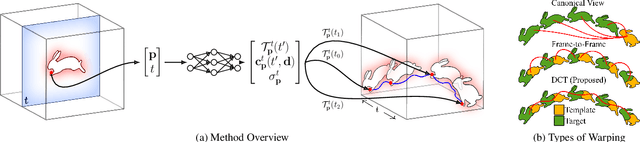
Recent approaches to render photorealistic views from a limited set of photographs have pushed the boundaries of our interactions with pictures of static scenes. The ability to recreate moments, that is, time-varying sequences, is perhaps an even more interesting scenario, but it remains largely unsolved. We introduce DCT-NeRF, a coordinatebased neural representation for dynamic scenes. DCTNeRF learns smooth and stable trajectories over the input sequence for each point in space. This allows us to enforce consistency between any two frames in the sequence, which results in high quality reconstruction, particularly in dynamic regions.
DeepGMR: Learning Latent Gaussian Mixture Models for Registration
Aug 20, 2020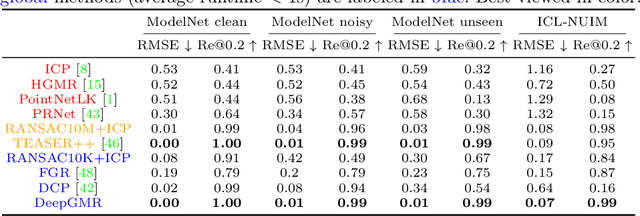
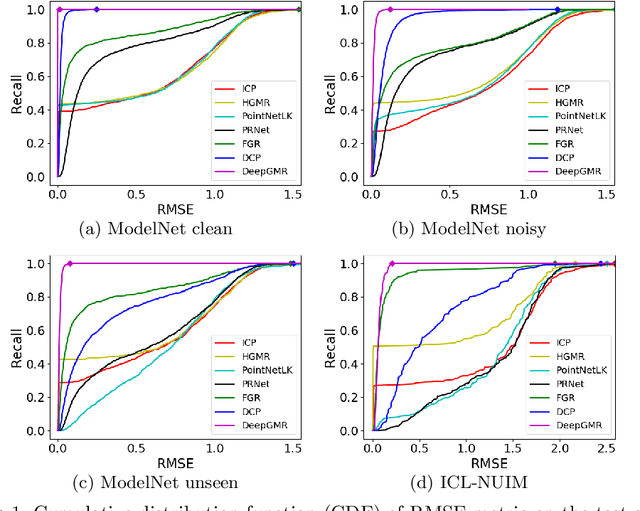
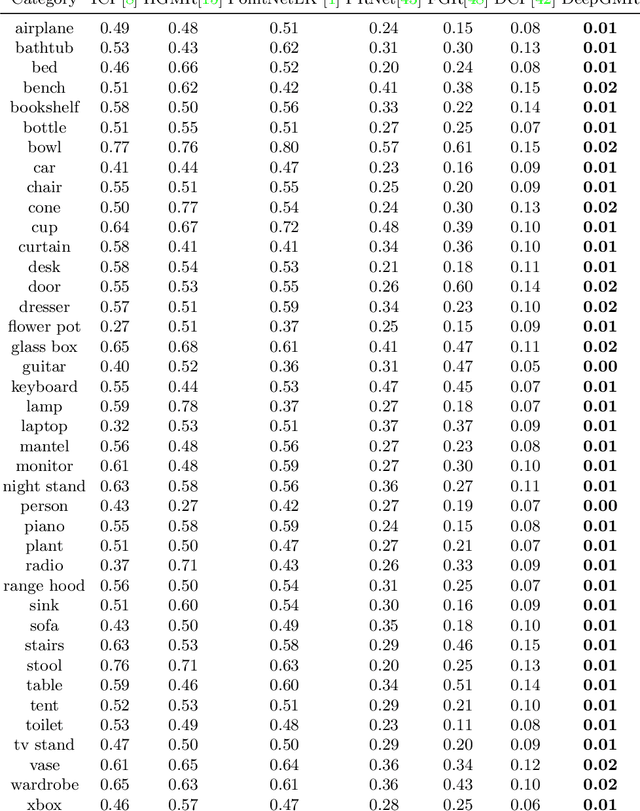
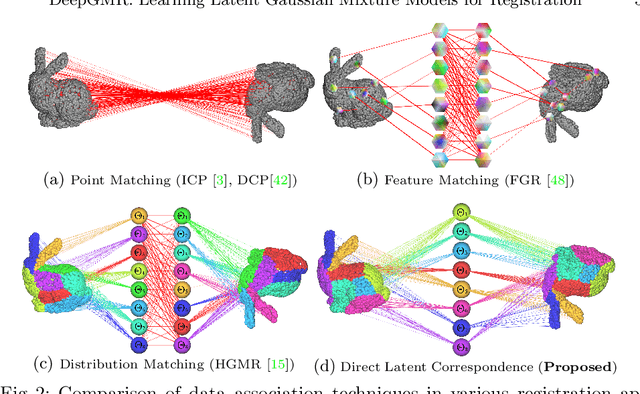
Point cloud registration is a fundamental problem in 3D computer vision, graphics and robotics. For the last few decades, existing registration algorithms have struggled in situations with large transformations, noise, and time constraints. In this paper, we introduce Deep Gaussian Mixture Registration (DeepGMR), the first learning-based registration method that explicitly leverages a probabilistic registration paradigm by formulating registration as the minimization of KL-divergence between two probability distributions modeled as mixtures of Gaussians. We design a neural network that extracts pose-invariant correspondences between raw point clouds and Gaussian Mixture Model (GMM) parameters and two differentiable compute blocks that recover the optimal transformation from matched GMM parameters. This construction allows the network learn an SE(3)-invariant feature space, producing a global registration method that is real-time, generalizable, and robust to noise. Across synthetic and real-world data, our proposed method shows favorable performance when compared with state-of-the-art geometry-based and learning-based registration methods.
EOE: Expected Overlap Estimation over Unstructured Point Cloud Data
Aug 06, 2018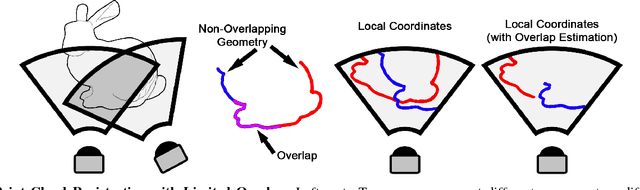
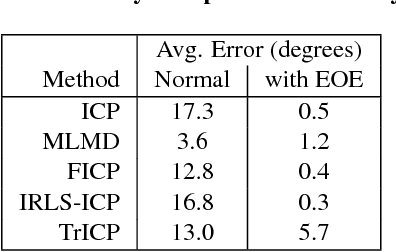
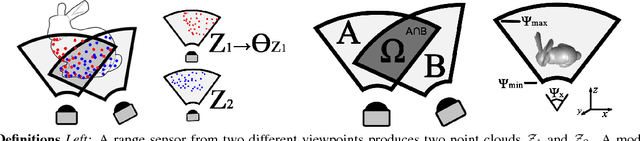
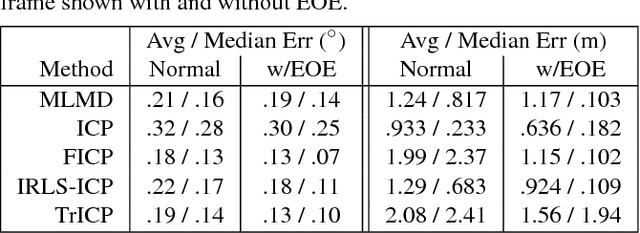
We present an iterative overlap estimation technique to augment existing point cloud registration algorithms that can achieve high performance in difficult real-world situations where large pose displacement and non-overlapping geometry would otherwise cause traditional methods to fail. Our approach estimates overlapping regions through an iterative Expectation Maximization procedure that encodes the sensor field-of-view into the registration process. The proposed technique, Expected Overlap Estimation (EOE), is derived from the observation that differences in field-of-view violate the iid assumption implicitly held by all maximum likelihood based registration techniques. We demonstrate how our approach can augment many popular registration methods with minimal computational overhead. Through experimentation on both synthetic and real-world datasets, we find that adding an explicit overlap estimation step can aid robust outlier handling and increase the accuracy of both ICP-based and GMM-based registration methods, especially in large unstructured domains and where the amount of overlap between point clouds is very small.
Fast and Accurate Point Cloud Registration using Trees of Gaussian Mixtures
Jul 06, 2018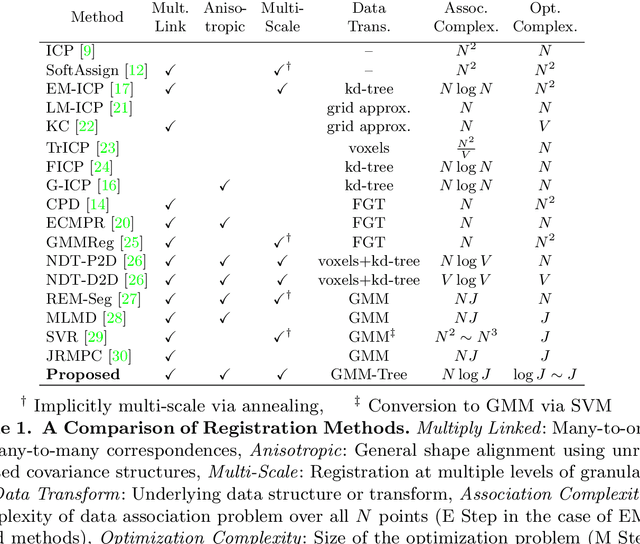

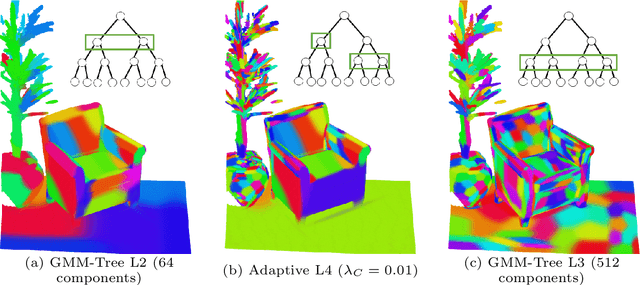
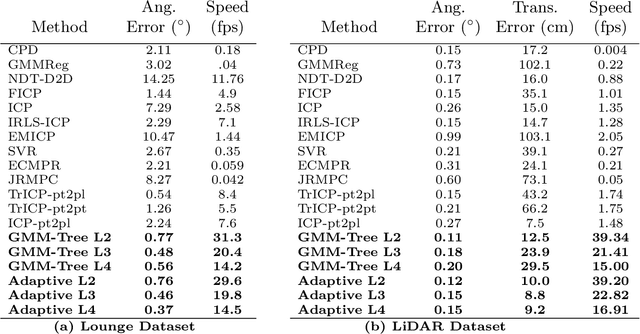
Point cloud registration sits at the core of many important and challenging 3D perception problems including autonomous navigation, SLAM, object/scene recognition, and augmented reality. In this paper, we present a new registration algorithm that is able to achieve state-of-the-art speed and accuracy through its use of a hierarchical Gaussian Mixture Model (GMM) representation. Our method constructs a top-down multi-scale representation of point cloud data by recursively running many small-scale data likelihood segmentations in parallel on a GPU. We leverage the resulting representation using a novel PCA-based optimization criterion that adaptively finds the best scale to perform data association between spatial subsets of point cloud data. Compared to previous Iterative Closest Point and GMM-based techniques, our tree-based point association algorithm performs data association in logarithmic-time while dynamically adjusting the level of detail to best match the complexity and spatial distribution characteristics of local scene geometry. In addition, unlike other GMM methods that restrict covariances to be isotropic, our new PCA-based optimization criterion well-approximates the true MLE solution even when fully anisotropic Gaussian covariances are used. Efficient data association, multi-scale adaptability, and a robust MLE approximation produce an algorithm that is up to an order of magnitude both faster and more accurate than current state-of-the-art on a wide variety of 3D datasets captured from LiDAR to structured light.