 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast and Accurate Point Cloud Registration using Trees of Gaussian Mixtures
Paper and Code
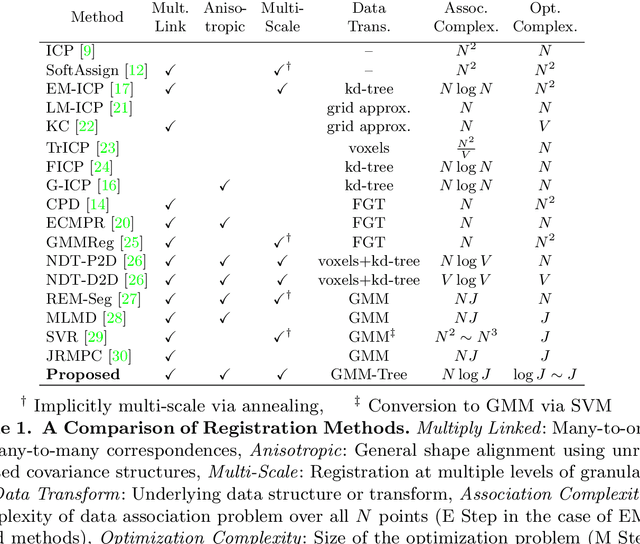

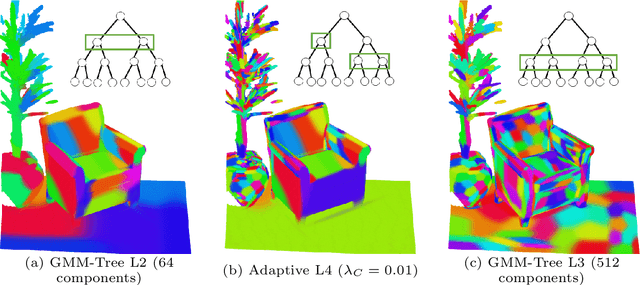
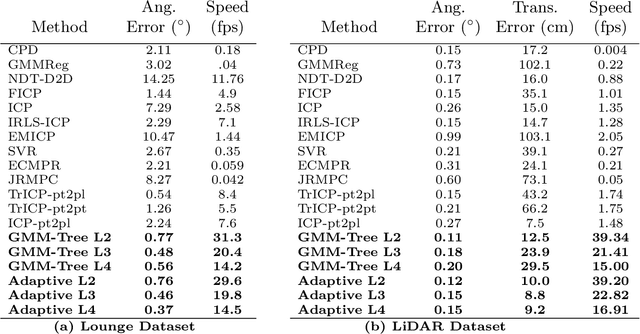
Point cloud registration sits at the core of many important and challenging 3D perception problems including autonomous navigation, SLAM, object/scene recognition, and augmented reality. In this paper, we present a new registration algorithm that is able to achieve state-of-the-art speed and accuracy through its use of a hierarchical Gaussian Mixture Model (GMM) representation. Our method constructs a top-down multi-scale representation of point cloud data by recursively running many small-scale data likelihood segmentations in parallel on a GPU. We leverage the resulting representation using a novel PCA-based optimization criterion that adaptively finds the best scale to perform data association between spatial subsets of point cloud data. Compared to previous Iterative Closest Point and GMM-based techniques, our tree-based point association algorithm performs data association in logarithmic-time while dynamically adjusting the level of detail to best match the complexity and spatial distribution characteristics of local scene geometry. In addition, unlike other GMM methods that restrict covariances to be isotropic, our new PCA-based optimization criterion well-approximates the true MLE solution even when fully anisotropic Gaussian covariances are used. Efficient data association, multi-scale adaptability, and a robust MLE approximation produce an algorithm that is up to an order of magnitude both faster and more accurate than current state-of-the-art on a wide variety of 3D datasets captured from LiDAR to structured light.