 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeepGMR: Learning Latent Gaussian Mixture Models for Registration
Paper and Code
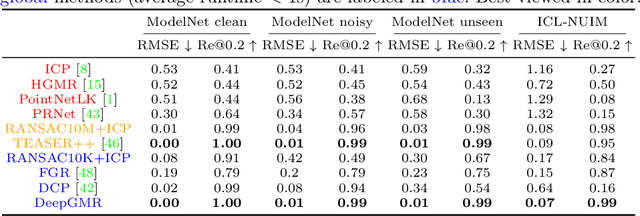
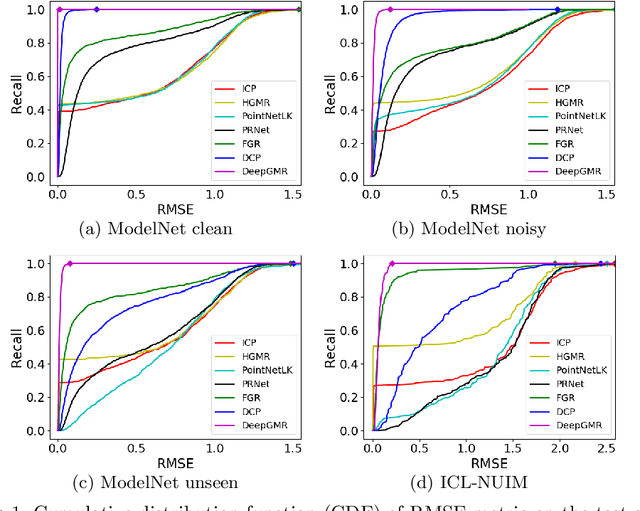
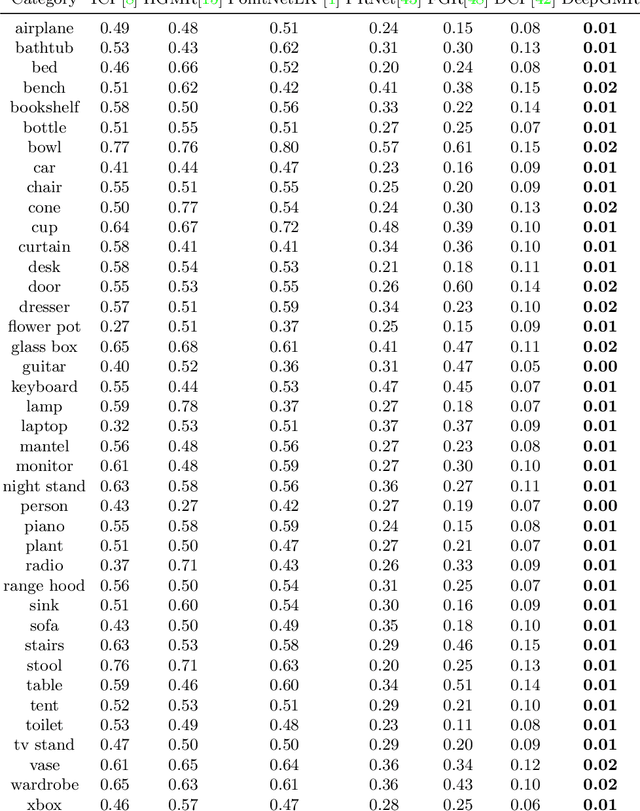
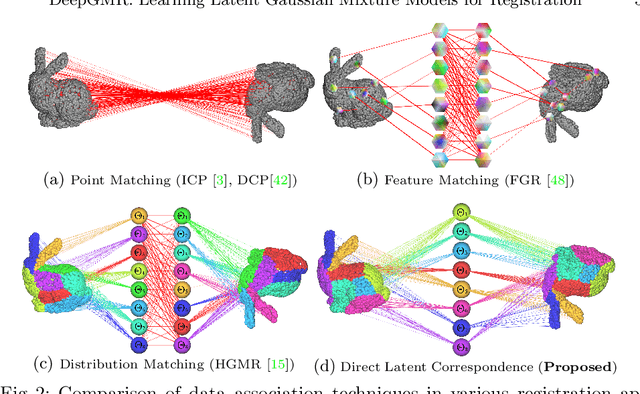
Point cloud registration is a fundamental problem in 3D computer vision, graphics and robotics. For the last few decades, existing registration algorithms have struggled in situations with large transformations, noise, and time constraints. In this paper, we introduce Deep Gaussian Mixture Registration (DeepGMR), the first learning-based registration method that explicitly leverages a probabilistic registration paradigm by formulating registration as the minimization of KL-divergence between two probability distributions modeled as mixtures of Gaussians. We design a neural network that extracts pose-invariant correspondences between raw point clouds and Gaussian Mixture Model (GMM) parameters and two differentiable compute blocks that recover the optimal transformation from matched GMM parameters. This construction allows the network learn an SE(3)-invariant feature space, producing a global registration method that is real-time, generalizable, and robust to noise. Across synthetic and real-world data, our proposed method shows favorable performance when compared with state-of-the-art geometry-based and learning-based registration methods.