 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvestigating Human Response, Behaviour, and Preference in Joint-Task Interaction
Nov 27, 2020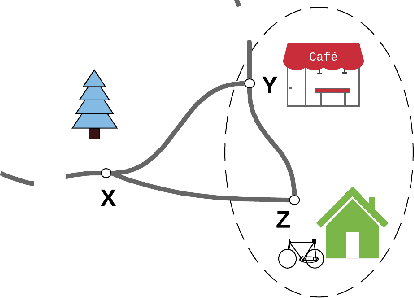
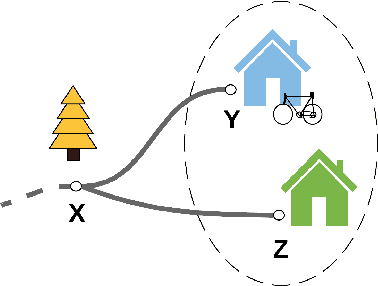
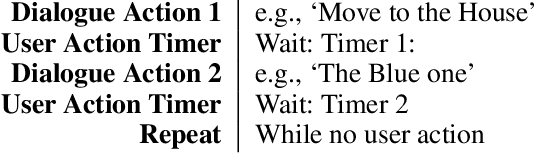
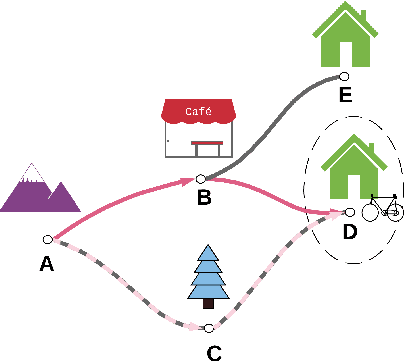
Human interaction relies on a wide range of signals, including non-verbal cues. In order to develop effective Explainable Planning (XAIP) agents it is important that we understand the range and utility of these communication channels. Our starting point is existing results from joint task interaction and their study in cognitive science. Our intention is that these lessons can inform the design of interaction agents -- including those using planning techniques -- whose behaviour is conditioned on the user's response, including affective measures of the user (i.e., explicitly incorporating the user's affective state within the planning model). We have identified several concepts at the intersection of plan-based agent behaviour and joint task interaction and have used these to design two agents: one reactive and the other partially predictive. We have designed an experiment in order to examine human behaviour and response as they interact with these agents. In this paper we present the designed study and the key questions that are being investigated. We also present the results from an empirical analysis where we examined the behaviour of the two agents for simulated users.
MuMMER: Socially Intelligent Human-Robot Interaction in Public Spaces
Sep 15, 2019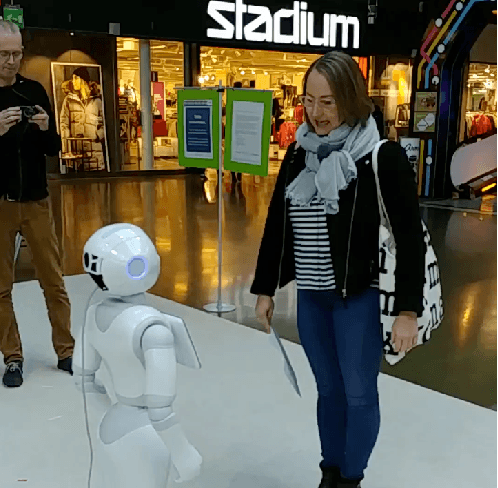
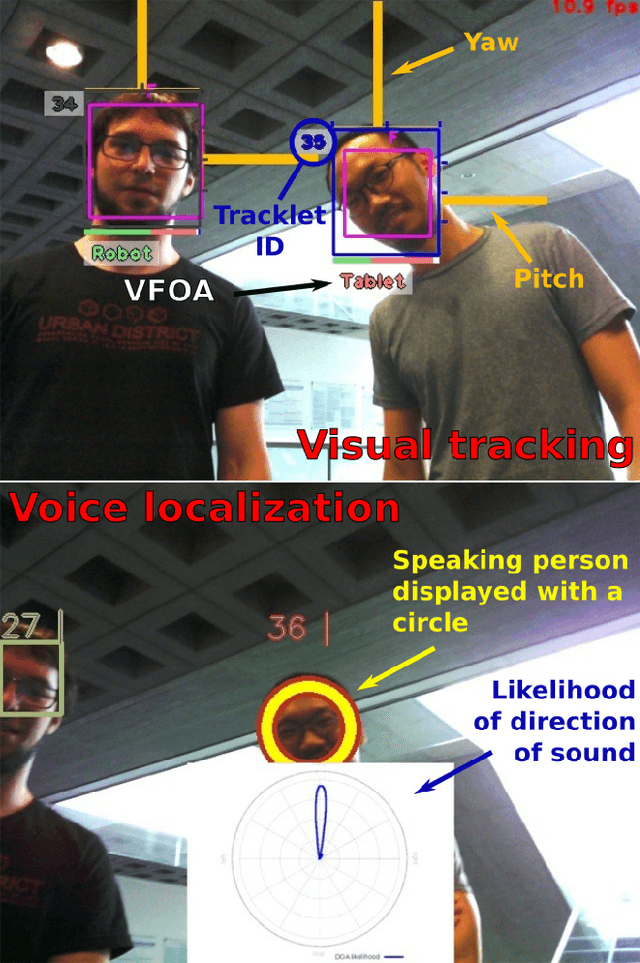
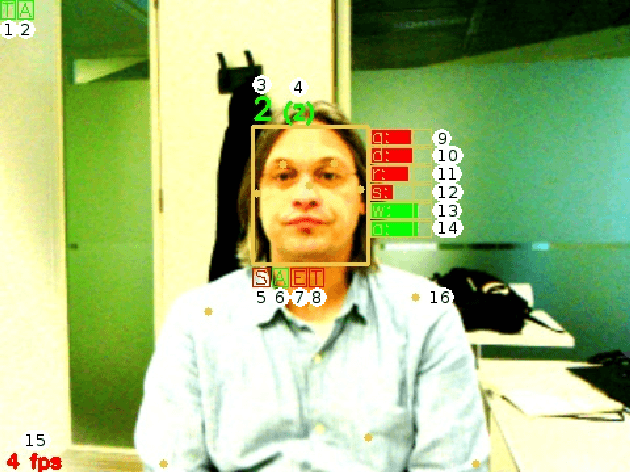
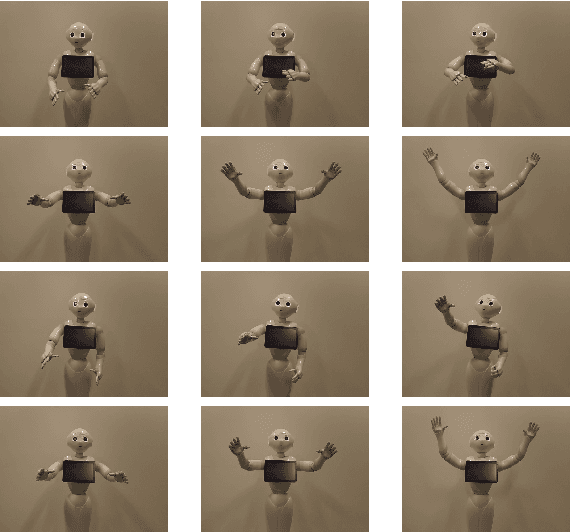
In the EU-funded MuMMER project, we have developed a social robot designed to interact naturally and flexibly with users in public spaces such as a shopping mall. We present the latest version of the robot system developed during the project. This system encompasses audio-visual sensing, social signal processing, conversational interaction, perspective taking, geometric reasoning, and motion planning. It successfully combines all these components in an overarching framework using the Robot Operating System (ROS) and has been deployed to a shopping mall in Finland interacting with customers. In this paper, we describe the system components, their interplay, and the resulting robot behaviours and scenarios provided at the shopping mall.