 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Task Performance: Human Experience in Human-Robot Collaboration
May 07, 2025Human interaction experience plays a crucial role in the effectiveness of human-machine collaboration, especially as interactions in future systems progress towards tighter physical and functional integration. While automation design has been shown to impact task performance, its influence on human experience metrics such as flow, sense of agency (SoA), and embodiment remains underexplored. This study investigates how variations in automation design affect these psychological experience measures and examines correlations between subjective experience and physiological indicators. A user study was conducted in a simulated wood workshop, where participants collaborated with a lightweight robot under four automation levels. The results of the study indicate that medium automation levels enhance flow, SoA and embodiment, striking a balance between support and user autonomy. In contrast, higher automation, despite optimizing task performance, diminishes perceived flow and agency. Furthermore, we observed that grip force might be considered as a real-time proxy of SoA, while correlations with heart rate variability were inconclusive. The findings underscore the necessity for automation strategies that integrate human- centric metrics, aiming to optimize both performance and user experience in collaborative robotic systems
Personalized and Demand-Based Education Concept: Practical Tools for Control Engineers
Apr 10, 2025



This paper presents a personalized lecture concept using educational blocks and its demonstrative application in a new university lecture. Higher education faces daily challenges: deep and specialized knowledge is available from everywhere and accessible to almost everyone. University lecturers of specialized master courses confront the problem that their lectures are either too boring or too complex for the attending students. Additionally, curricula are changing more rapidly than they have in the past 10-30 years. The German education system comprises different educational forms, with universities providing less practical content. Consequently, many university students do not obtain the practical skills they should ideally gain through university lectures. Therefore, in this work, a new lecture concept is proposed based on the extension of the just-in-time teaching paradigm: Personalized and Demand-Based Education. This concept includes: 1) an initial assessment of students' backgrounds, 2) selecting the appropriate educational blocks, and 3) collecting ongoing feedback during the semester. The feedback was gathered via Pingo, ensuring anonymity for the students. Our concept was exemplarily tested in the new lecture "Practical Tools for Control Engineers" at the Karlsruhe Institute of Technology. The initial results indicate that our proposed concept could be beneficial in addressing the current challenges in higher education.
Reacting on human stubbornness in human-machine trajectory planning
Jul 24, 2024In this paper, a method for a cooperative trajectory planning between a human and an automation is extended by a behavioral model of the human. This model can characterize the stubbornness of the human, which measures how strong the human adheres to his preferred trajectory. Accordingly, a static model is introduced indicating a link between the force in haptically coupled human-robot interactions and humans's stubbornness. The introduced stubbornness parameter enables an application-independent reaction of the automation for the cooperative trajectory planning. Simulation results in the context of human-machine cooperation in a care application show that the proposed behavioral model can quantitatively estimate the stubbornness of the interacting human, enabling a more targeted adaptation of the automation to the human behavior.
Toward Adaptive Cooperation: Model-Based Shared Control Using LQ-Differential Games
Mar 17, 2024This paper introduces a novel model-based adaptive shared control to allow for the identification and design challenge for shared-control systems, in which humans and automation share control tasks. The main challenge is the adaptive behavior of the human in such shared control interactions. Consequently, merely identifying human behavior without considering automation is insufficient and often leads to inadequate automation design. Therefore, this paper proposes a novel solution involving online identification of the human and the adaptation of shared control using Linear-Quadratic differential games. The effectiveness of the proposed online adaptation is analyzed in simulations and compared with a non-adaptive shared control from the state of the art. Finally, the proposed approach is tested through human-in-the-loop experiments, highlighting its suitability for real-time applications.
Shared Telemanipulation with VR controllers in an anti slosh scenario
Sep 14, 2023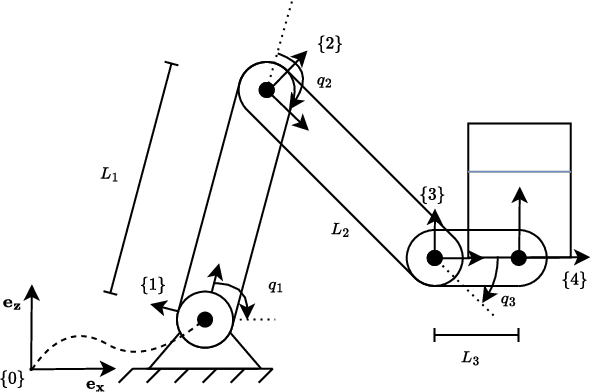
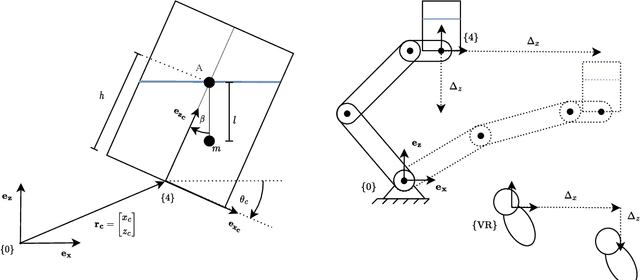
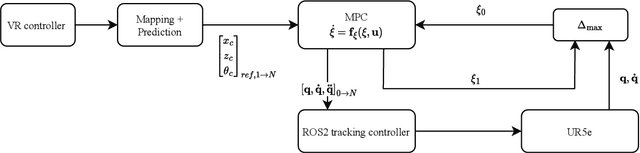
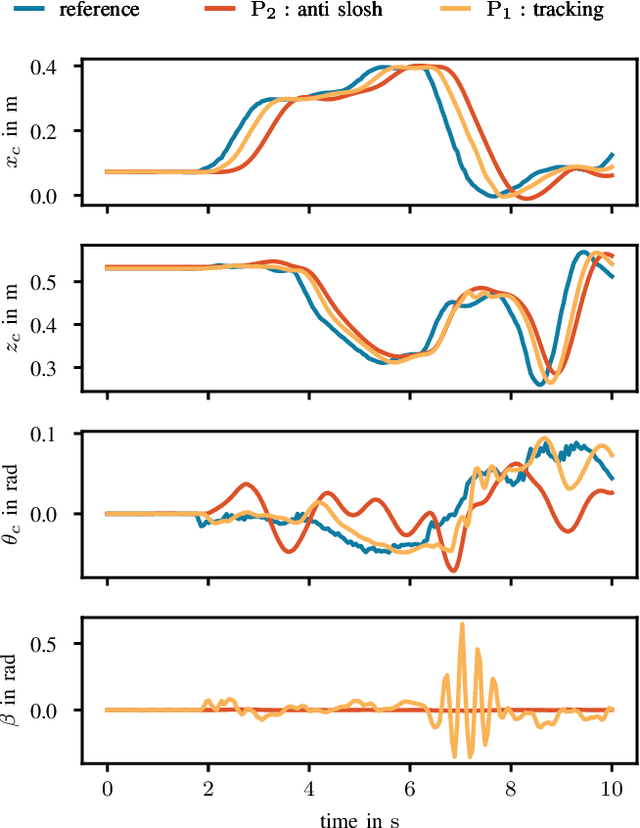
Telemanipulation has become a promising technology that combines human intelligence with robotic capabilities to perform tasks remotely. However, it faces several challenges such as insufficient transparency, low immersion, and limited feedback to the human operator. Moreover, the high cost of haptic interfaces is a major limitation for the application of telemanipulation in various fields, including elder care, where our research is focused. To address these challenges, this paper proposes the usage of nonlinear model predictive control for telemanipulation using low-cost virtual reality controllers, including multiple control goals in the objective function. The framework utilizes models for human input prediction and taskrelated models of the robot and the environment. The proposed framework is validated on an UR5e robot arm in the scenario of handling liquid without spilling. Further extensions of the framework such as pouring assistance and collision avoidance can easily be included.
Intention-Aware Decision-Making for Mixed Intersection Scenarios
Mar 29, 2023This paper presents a white-box intention-aware decision-making for the handling of interactions between a pedestrian and an automated vehicle (AV) in an unsignalized street crossing scenario. Moreover, a design framework has been developed, which enables automated parameterization of the decision-making. This decision-making is designed in such a manner that it can understand pedestrians in urban traffic and can react accordingly to their intentions. That way, a human-like response to the actions of the pedestrian is ensured, leading to a higher acceptance of AVs. The core notion of this paper is that the intention prediction of the pedestrian to cross the street and decision-making are divided into two subsystems. On the one hand, the intention detection is a data-driven, black-box model. Thus, it can model the complex behavior of the pedestrians. On the other hand, the decision-making is a white-box model to ensure traceability and to enable a rapid verification and validation of AVs. This white-box decision-making provides human-like behavior and a guaranteed prevention of deadlocks. An additional benefit is that the proposed decision-making requires low computational resources only enabling real world usage. The automated parameterization uses a particle swarm optimization and compares two different models of the pedestrian: The social force model and the Markov decision process model. Consequently, a rapid design of the decision-making is possible and different pedestrian behaviors can be taken into account. The results reinforce the applicability of the proposed intention-aware decision-making.
Development of a Mobile Vehicle Manipulator Simulator for the Validation of Shared Control Concepts
Nov 23, 2022This paper presents the development of a real-time simulator for the validation of controlling a large vehicle manipulator. The need for this development can be justified by the lack of such a simulator: There are neither open source projects nor commercial products, which would be suitable for testing cooperative control concepts. First, we present the nonlinear simulation model of the vehicle and the manipulator. For the modeling MATLAB/Simulink is used, which also enables a code generation into standalone C++ ROS-Nodes (Robot Operating System Nodes). The emerging challenges of the code generation are also discussed. Then, the obtained standalone C++ ROS-Nodes integrated in the simulator framework which includes a graphical user interface, a steering wheel and a joystick. This simulator can provide the real-time calculation of the overall system's motion enabling the interaction of human and automation. Furthermore, a qualitative validation of the model is given. Finally, the functionalities of the simulator is demonstrated in tests with a human operators.
Introducing and Applying Newtonian Blurring: An Augmented Dataset of 126,000 Human Connectomes at braingraph.org
Oct 21, 2020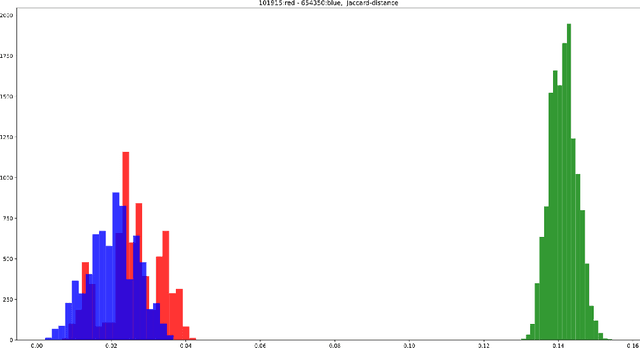
Gaussian blurring is a well-established method for image data augmentation: it may generate a large set of images from a small set of pictures for training and testing purposes for Artificial Intelligence (AI) applications. When we apply AI for non-imagelike biological data, hardly any related method exists. Here we introduce the "Newtonian blurring" in human braingraph (or connectome) augmentation: Started from a dataset of 1053 subjects, we first repeat a probabilistic weighted braingraph construction algorithm 10 times for describing the connections of distinct cerebral areas, then take 7 repetitions in every possible way, delete the lower and upper extremes, and average the remaining 7-2=5 edge-weights for the data of each subject. This way we augment the 1053 graph-set to 120 x 1053 = 126,360 graphs. In augmentation techniques, it is an important requirement that no artificial additions should be introduced into the dataset. Gaussian blurring and also this Newtonian blurring satisfy this goal. The resulting dataset of 126,360 graphs, each in 5 resolutions (i.e., 631,800 graphs in total), is freely available at the site https://braingraph.org/cms/download-pit-group-connectomes/. Augmenting with Newtonian blurring may also be applicable in other non-image related fields, where probabilistic processing and data averaging are implemented.