 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSINRL: Socially Integrated Navigation with Reinforcement Learning using Spiking Neural Networks
Dec 08, 2025



Integrating autonomous mobile robots into human environments requires human-like decision-making and energy-efficient, event-based computation. Despite progress, neuromorphic methods are rarely applied to Deep Reinforcement Learning (DRL) navigation approaches due to unstable training. We address this gap with a hybrid socially integrated DRL actor-critic approach that combines Spiking Neural Networks (SNNs) in the actor with Artificial Neural Networks (ANNs) in the critic and a neuromorphic feature extractor to capture temporal crowd dynamics and human-robot interactions. Our approach enhances social navigation performance and reduces estimated energy consumption by approximately 1.69 orders of magnitude.
Disentangling Coordiante Frames for Task Specific Motion Retargeting in Teleoperation using Shared Control and VR Controllers
May 19, 2025Task performance in terms of task completion time in teleoperation is still far behind compared to humans conducting tasks directly. One large identified impact on this is the human capability to perform transformations and alignments, which is directly influenced by the point of view and the motion retargeting strategy. In modern teleoperation systems, motion retargeting is usually implemented through a one time calibration or switching modes. Complex tasks, like concatenated screwing, might be difficult, because the operator has to align (e.g. mirror) rotational and translational input commands. Recent research has shown, that the separation of translation and rotation leads to increased task performance. This work proposes a formal motion retargeting method, which separates translational and rotational input commands. This method is then included in a optimal control based trajectory planner and shown to work on a UR5e manipulator.
Shared Telemanipulation with VR controllers in an anti slosh scenario
Sep 14, 2023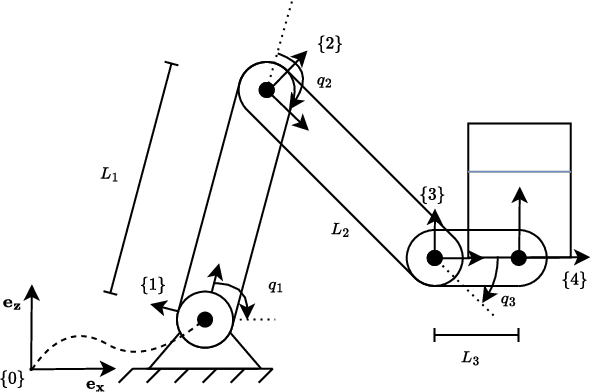
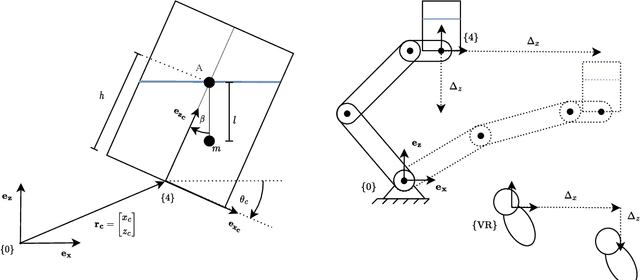
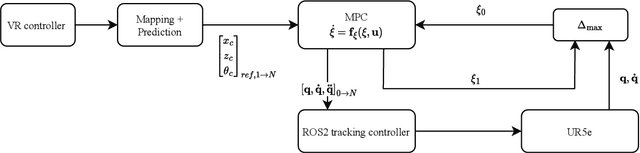
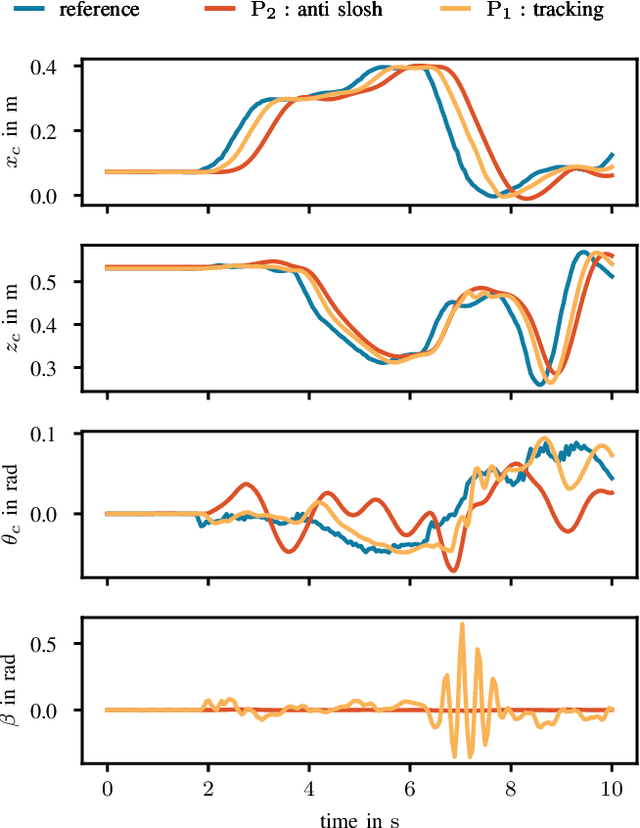
Telemanipulation has become a promising technology that combines human intelligence with robotic capabilities to perform tasks remotely. However, it faces several challenges such as insufficient transparency, low immersion, and limited feedback to the human operator. Moreover, the high cost of haptic interfaces is a major limitation for the application of telemanipulation in various fields, including elder care, where our research is focused. To address these challenges, this paper proposes the usage of nonlinear model predictive control for telemanipulation using low-cost virtual reality controllers, including multiple control goals in the objective function. The framework utilizes models for human input prediction and taskrelated models of the robot and the environment. The proposed framework is validated on an UR5e robot arm in the scenario of handling liquid without spilling. Further extensions of the framework such as pouring assistance and collision avoidance can easily be included.