 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDisentangling Coordiante Frames for Task Specific Motion Retargeting in Teleoperation using Shared Control and VR Controllers
May 19, 2025Task performance in terms of task completion time in teleoperation is still far behind compared to humans conducting tasks directly. One large identified impact on this is the human capability to perform transformations and alignments, which is directly influenced by the point of view and the motion retargeting strategy. In modern teleoperation systems, motion retargeting is usually implemented through a one time calibration or switching modes. Complex tasks, like concatenated screwing, might be difficult, because the operator has to align (e.g. mirror) rotational and translational input commands. Recent research has shown, that the separation of translation and rotation leads to increased task performance. This work proposes a formal motion retargeting method, which separates translational and rotational input commands. This method is then included in a optimal control based trajectory planner and shown to work on a UR5e manipulator.
Behavior Forests: Real-Time Discovery of Dynamic Behavior for Data Selection
Jul 02, 2024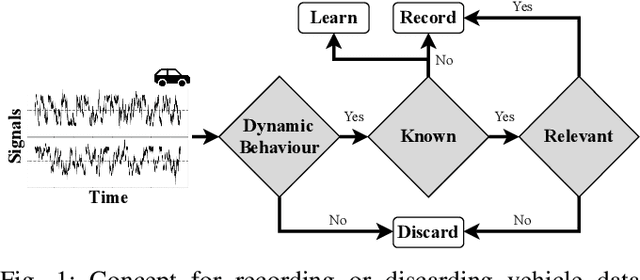
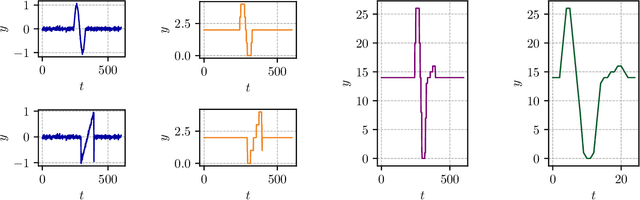
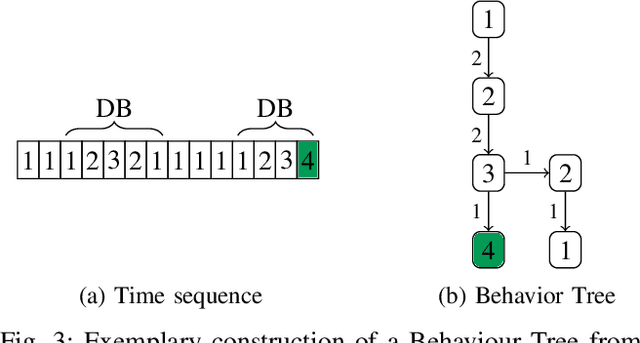
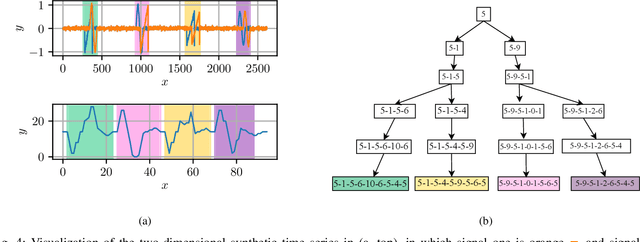
Automated Driving Systems (ADS) development relies on utilizing real-world vehicle data. The volume of data generated by modern vehicles presents transmission, storage, and computational challenges. Focusing on Dynamic Behavior (DB) offers a promising approach to distinguish relevant from irrelevant information for ADS functionalities, thereby reducing data. Time series pattern recognition is beneficial for this task as it can analyze the temporal context of vehicle driving behavior. However, existing state-of-the-art methods often lack the adaptability to identify variable-length patterns or provide analytical descriptions of discovered patterns. This contribution proposes a Behavior Forest framework for real-time data selection by constructing a Behavior Graph during vehicle operation, facilitating analytical descriptions without pre-training. The method demonstrates its performance using a synthetically generated and electrocardiogram data set. An automotive time series data set is used to evaluate the data reduction capabilities, in which this method discarded 96.01% of the incoming data stream, while relevant DB remain included.
CLIPping the Limits: Finding the Sweet Spot for Relevant Images in Automated Driving Systems Perception Testing
Apr 08, 2024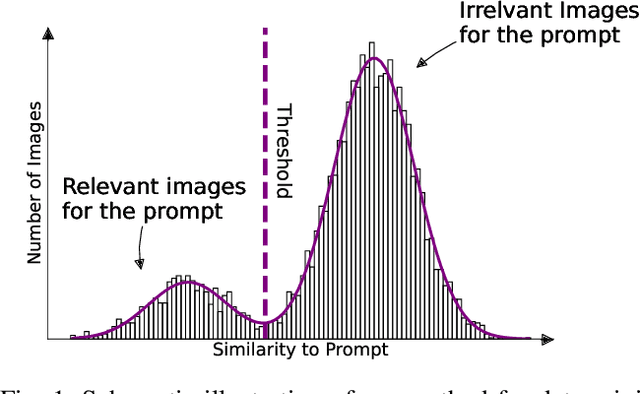
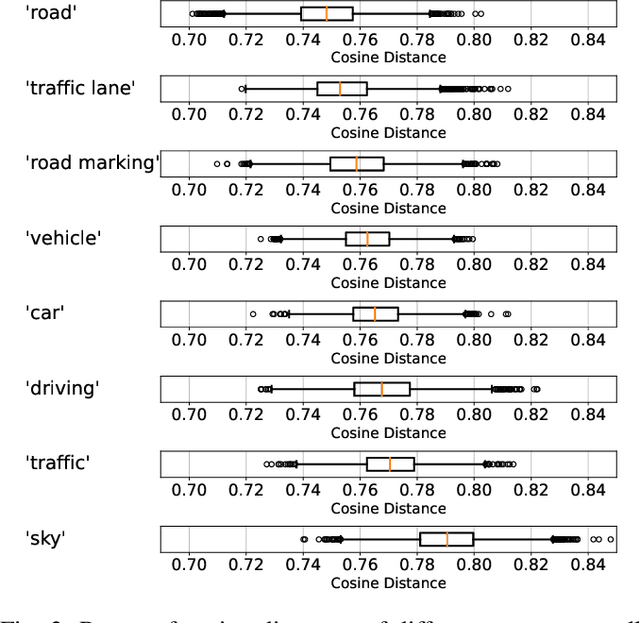
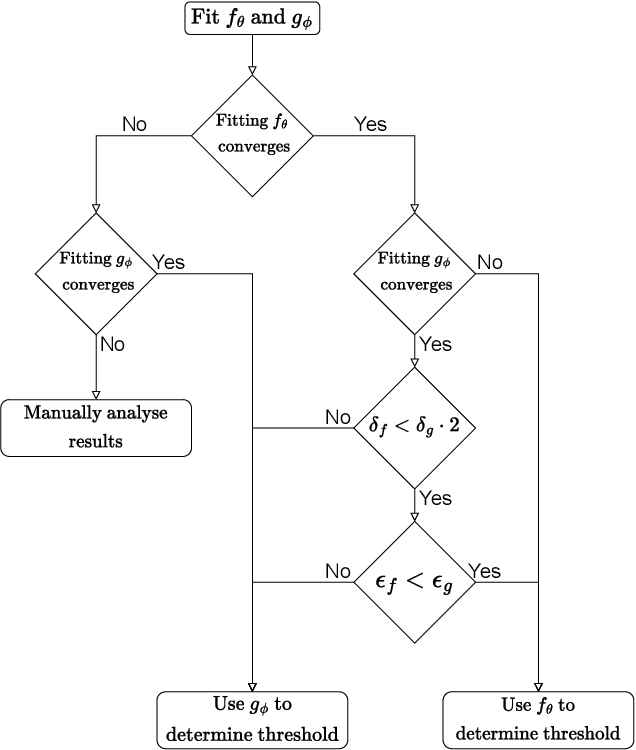
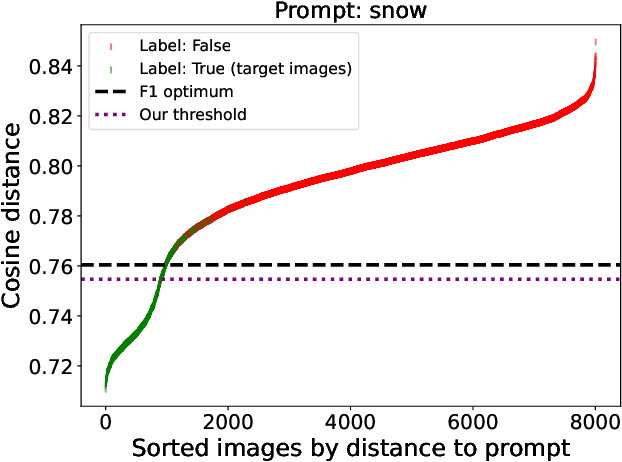
Perception systems, especially cameras, are the eyes of automated driving systems. Ensuring that they function reliably and robustly is therefore an important building block in the automation of vehicles. There are various approaches to test the perception of automated driving systems. Ultimately, however, it always comes down to the investigation of the behavior of perception systems under specific input data. Camera images are a crucial part of the input data. Image data sets are therefore collected for the testing of automated driving systems, but it is non-trivial to find specific images in these data sets. Thanks to recent developments in neural networks, there are now methods for sorting the images in a data set according to their similarity to a prompt in natural language. In order to further automate the provision of search results, we make a contribution by automating the threshold definition in these sorted results and returning only the images relevant to the prompt as a result. Our focus is on preventing false positives and false negatives equally. It is also important that our method is robust and in the case that our assumptions are not fulfilled, we provide a fallback solution.
Unveiling Objects with SOLA: An Annotation-Free Image Search on the Object Level for Automotive Data Sets
Dec 07, 2023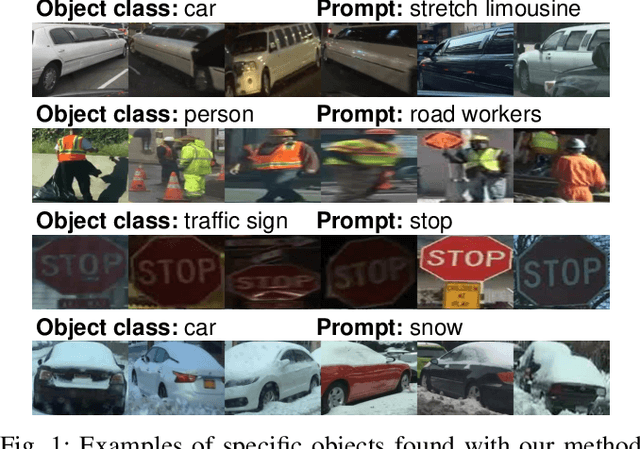
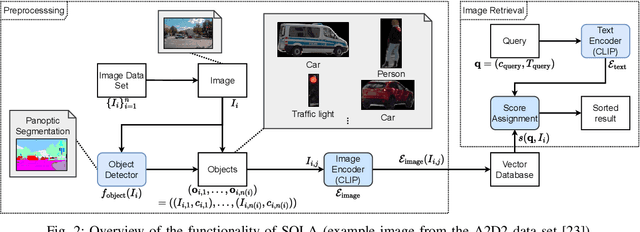


Huge image data sets are the fundament for the development of the perception of automated driving systems. A large number of images is necessary to train robust neural networks that can cope with diverse situations. A sufficiently large data set contains challenging situations and objects. For testing the resulting functions, it is necessary that these situations and objects can be found and extracted from the data set. While it is relatively easy to record a large amount of unlabeled data, it is far more difficult to find demanding situations and objects. However, during the development of perception systems, it must be possible to access challenging data without having to perform lengthy and time-consuming annotations. A developer must therefore be able to search dynamically for specific situations and objects in a data set. Thus, we designed a method which is based on state-of-the-art neural networks to search for objects with certain properties within an image. For the ease of use, the query of this search is described using natural language. To determine the time savings and performance gains, we evaluated our method qualitatively and quantitatively on automotive data sets.
Focus on the Challenges: Analysis of a User-friendly Data Search Approach with CLIP in the Automotive Domain
Apr 21, 2023Handling large amounts of data has become a key for developing automated driving systems. Especially for developing highly automated driving functions, working with images has become increasingly challenging due to the sheer size of the required data. Such data has to satisfy different requirements to be usable in machine learning-based approaches. Thus, engineers need to fully understand their large image data sets for the development and test of machine learning algorithms. However, current approaches lack automatability, are not generic and are limited in their expressiveness. Hence, this paper aims to analyze a state-of-the-art text and image embedding neural network and guides through the application in the automotive domain. This approach enables the search for similar images and the search based on a human understandable text-based description. Our experiments show the automatability and generalizability of our proposed method for handling large data sets in the automotive domain.