 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReflection-Based Task Adaptation for Self-Improving VLA
Oct 14, 2025Pre-trained Vision-Language-Action (VLA) models represent a major leap towards general-purpose robots, yet efficiently adapting them to novel, specific tasks in-situ remains a significant hurdle. While reinforcement learning (RL) is a promising avenue for such adaptation, the process often suffers from low efficiency, hindering rapid task mastery. We introduce Reflective Self-Adaptation, a framework for rapid, autonomous task adaptation without human intervention. Our framework establishes a self-improving loop where the agent learns from its own experience to enhance both strategy and execution. The core of our framework is a dual-pathway architecture that addresses the full adaptation lifecycle. First, a Failure-Driven Reflective RL pathway enables rapid learning by using the VLM's causal reasoning to automatically synthesize a targeted, dense reward function from failure analysis. This provides a focused learning signal that significantly accelerates policy exploration. However, optimizing such proxy rewards introduces a potential risk of "reward hacking," where the agent masters the reward function but fails the actual task. To counteract this, our second pathway, Success-Driven Quality-Guided SFT, grounds the policy in holistic success. It identifies and selectively imitates high-quality successful trajectories, ensuring the agent remains aligned with the ultimate task goal. This pathway is strengthened by a conditional curriculum mechanism to aid initial exploration. We conduct experiments in challenging manipulation tasks. The results demonstrate that our framework achieves faster convergence and higher final success rates compared to representative baselines. Our work presents a robust solution for creating self-improving agents that can efficiently and reliably adapt to new environments.
Learn to Memorize and to Forget: A Continual Learning Perspective of Dynamic SLAM
Jul 18, 2024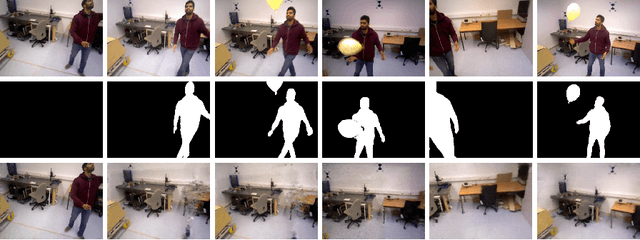
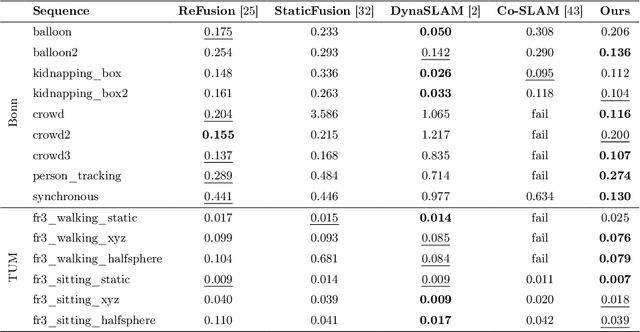
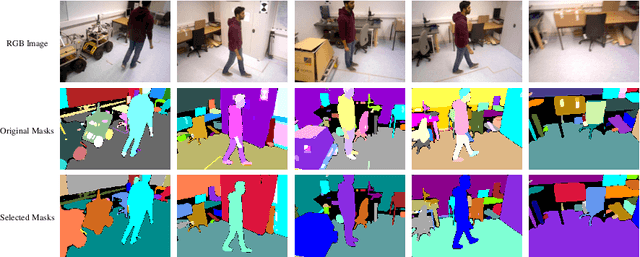
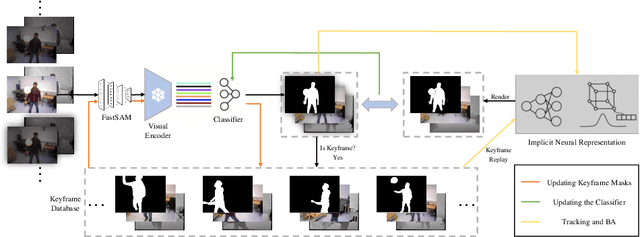
Simultaneous localization and mapping (SLAM) with implicit neural representations has received extensive attention due to the expressive representation power and the innovative paradigm of continual learning. However, deploying such a system within a dynamic environment has not been well-studied. Such challenges are intractable even for conventional algorithms since observations from different views with dynamic objects involved break the geometric and photometric consistency, whereas the consistency lays the foundation for joint optimizing the camera pose and the map parameters. In this paper, we best exploit the characteristics of continual learning and propose a novel SLAM framework for dynamic environments. While past efforts have been made to avoid catastrophic forgetting by exploiting an experience replay strategy, we view forgetting as a desirable characteristic. By adaptively controlling the replayed buffer, the ambiguity caused by moving objects can be easily alleviated through forgetting. We restrain the replay of the dynamic objects by introducing a continually-learned classifier for dynamic object identification. The iterative optimization of the neural map and the classifier notably improves the robustness of the SLAM system under a dynamic environment. Experiments on challenging datasets verify the effectiveness of the proposed framework.