 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearn to Memorize and to Forget: A Continual Learning Perspective of Dynamic SLAM
Paper and Code
Jul 18, 2024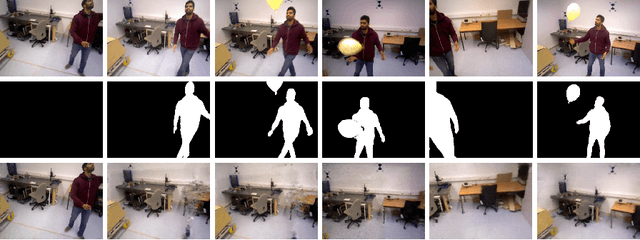
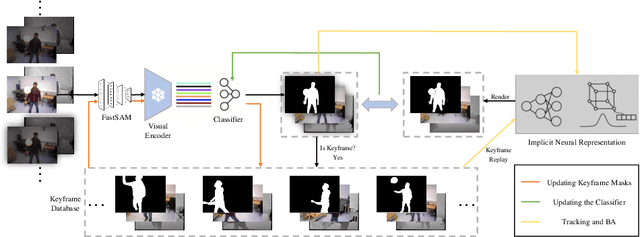
Simultaneous localization and mapping (SLAM) with implicit neural representations has received extensive attention due to the expressive representation power and the innovative paradigm of continual learning. However, deploying such a system within a dynamic environment has not been well-studied. Such challenges are intractable even for conventional algorithms since observations from different views with dynamic objects involved break the geometric and photometric consistency, whereas the consistency lays the foundation for joint optimizing the camera pose and the map parameters. In this paper, we best exploit the characteristics of continual learning and propose a novel SLAM framework for dynamic environments. While past efforts have been made to avoid catastrophic forgetting by exploiting an experience replay strategy, we view forgetting as a desirable characteristic. By adaptively controlling the replayed buffer, the ambiguity caused by moving objects can be easily alleviated through forgetting. We restrain the replay of the dynamic objects by introducing a continually-learned classifier for dynamic object identification. The iterative optimization of the neural map and the classifier notably improves the robustness of the SLAM system under a dynamic environment. Experiments on challenging datasets verify the effectiveness of the proposed framework.