 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Benchmark and Knowledge-Grounded Framework for Advanced Multimodal Personalization Study
Feb 22, 2026The powerful reasoning of modern Vision Language Models open a new frontier for advanced personalization study. However, progress in this area is critically hampered by the lack of suitable benchmarks. To address this gap, we introduce Life-Bench, a comprehensive, synthetically generated multimodal benchmark built on simulated user digital footprints. Life-Bench features over questions evaluating a wide spectrum of capabilities, from persona understanding to complex reasoning over historical data. These capabilities expand far beyond prior benchmarks, reflecting the critical demands essential for real-world applications. Furthermore, we propose LifeGraph, an end-to-end framework that organizes personal context into a knowledge graph to facilitate structured retrieval and reasoning. Our experiments on Life-Bench reveal that existing methods falter significantly on complex personalized tasks, exposing a large performance headroom, especially in relational, temporal and aggregative reasoning. While LifeGraph closes this gap by leveraging structured knowledge and demonstrates a promising direction, these advanced personalization tasks remain a critical open challenge, motivating new research in this area.
Average Outward Flux Skeletons for Environment Mapping and Topology Matching
Nov 27, 2021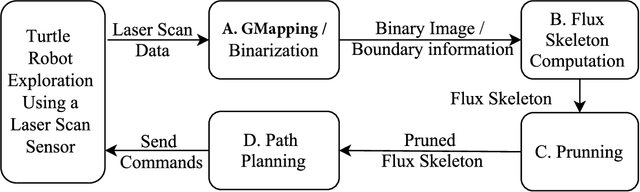
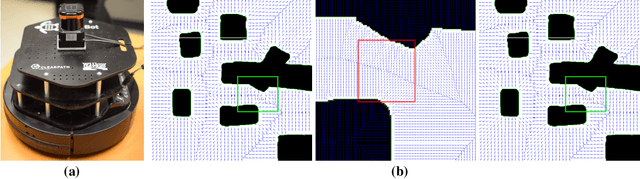
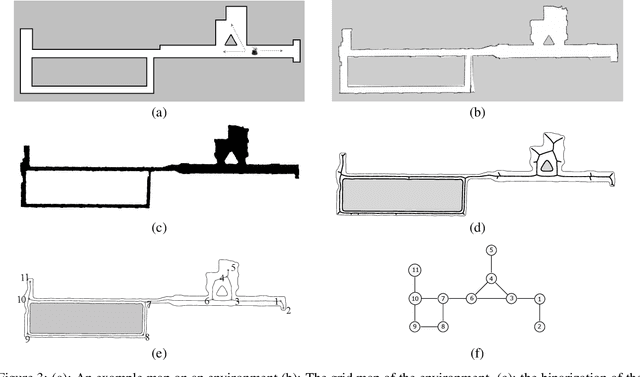
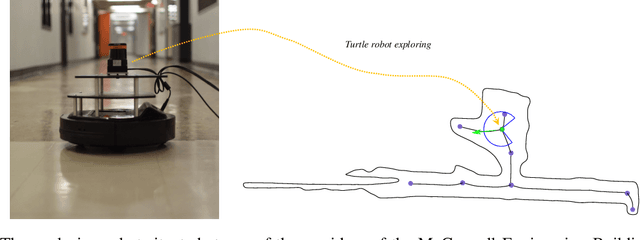
We consider how to directly extract a road map (also known as a topological representation) of an initially-unknown 2-dimensional environment via an online procedure that robustly computes a retraction of its boundaries. In this article, we first present the online construction of a topological map and the implementation of a control law for guiding the robot to the nearest unexplored area, first presented in [1]. The proposed method operates by allowing the robot to localize itself on a partially constructed map, calculate a path to unexplored parts of the environment (frontiers), compute a robust terminating condition when the robot has fully explored the environment, and achieve loop closure detection. The proposed algorithm results in smooth safe paths for the robot's navigation needs. The presented approach is any time algorithm that has the advantage that it allows for the active creation of topological maps from laser scan data, as it is being acquired. We also propose a navigation strategy based on a heuristic where the robot is directed towards nodes in the topological map that open to empty space. We then extend the work in [1] by presenting a topology matching algorithm that leverages the strengths of a particular spectral correspondence method [2], to match the mapped environments generated from our topology-making algorithm. Here, we concentrated on implementing a system that could be used to match the topologies of the mapped environment by using AOF Skeletons. In topology matching between two given maps and their AOF skeletons, we first find correspondences between points on the AOF skeletons of two different environments. We then align the (2D) points of the environments themselves. We also compute a distance measure between two given environments, based on their extracted AOF skeletons and their topology, as the sum of the matching errors between corresponding points.
Affinity Graph Supervision for Visual Recognition
Mar 19, 2020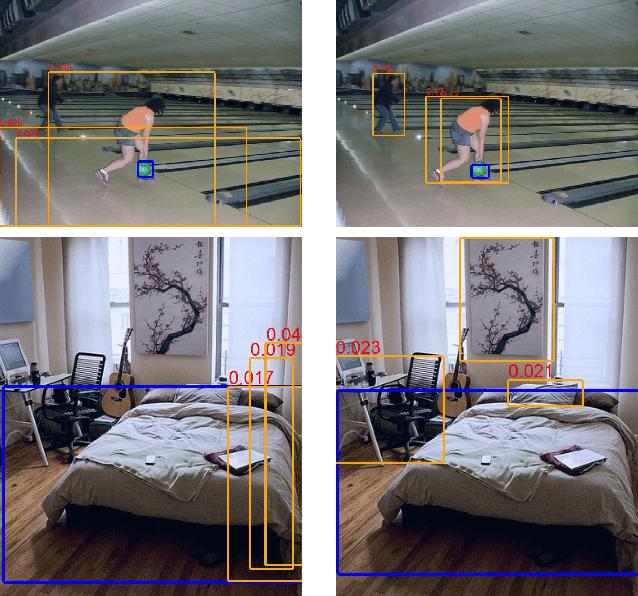


Affinity graphs are widely used in deep architectures, including graph convolutional neural networks and attention networks. Thus far, the literature has focused on abstracting features from such graphs, while the learning of the affinities themselves has been overlooked. Here we propose a principled method to directly supervise the learning of weights in affinity graphs, to exploit meaningful connections between entities in the data source. Applied to a visual attention network, our affinity supervision improves relationship recovery between objects, even without the use of manually annotated relationship labels. We further show that affinity learning between objects boosts scene categorization performance and that the supervision of affinity can also be applied to graphs built from mini-batches, for neural network training. In an image classification task we demonstrate consistent improvement over the baseline, with diverse network architectures and datasets.
FAN: Focused Attention Networks
Jun 01, 2019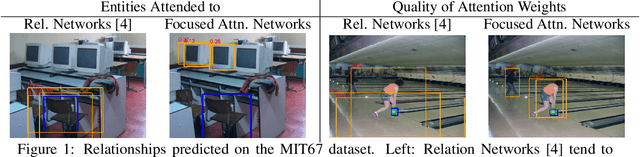
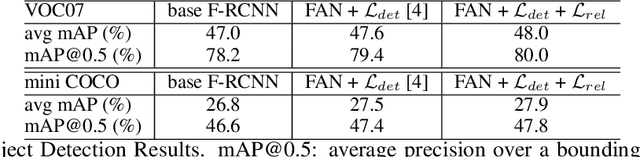
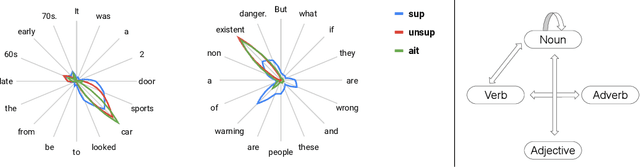

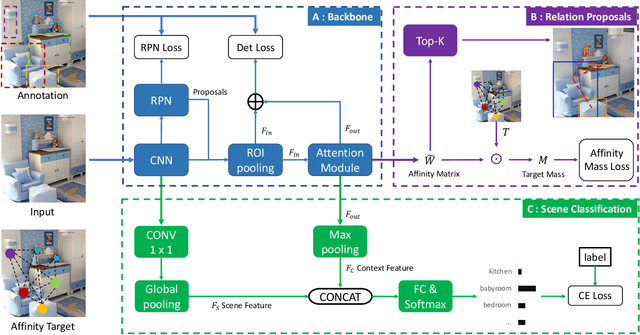
Attention networks show promise for both vision and language tasks, by emphasizing relationships between constituent elements through appropriate weighting functions. Such elements could be regions in an image output by a region proposal network, or words in a sentence, represented by word embedding. Thus far, however, the learning of attention weights has been driven solely by the minimization of task specific loss functions. We here introduce a method of learning attention weights to better emphasize informative pair-wise relations between entities. The key idea is to use a novel center-mass cross entropy loss, which can be applied in conjunction with the task specific ones. We then introduce a focused attention backbone to learn these attention weights for general tasks. We demonstrate that the focused attention module leads to a new state-of-the-art for the recovery of relations in a relationship proposal task. Our experiments show that it also boosts performance for diverse vision and language tasks, including object detection, scene categorization and document classification.
Local Spectral Graph Convolution for Point Set Feature Learning
Mar 15, 2018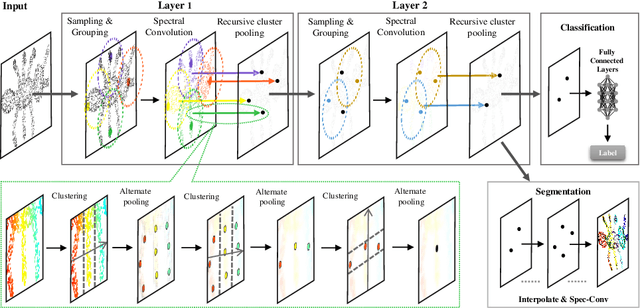

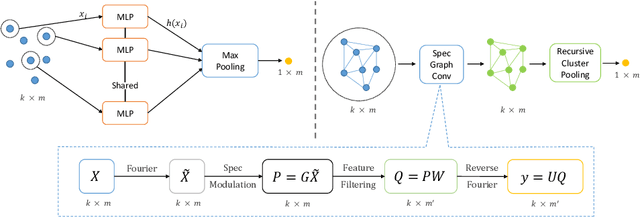
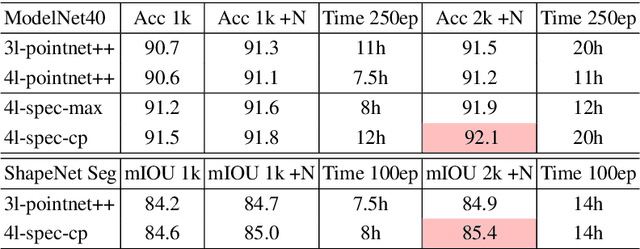
Feature learning on point clouds has shown great promise, with the introduction of effective and generalizable deep learning frameworks such as pointnet++. Thus far, however, point features have been abstracted in an independent and isolated manner, ignoring the relative layout of neighboring points as well as their features. In the present article, we propose to overcome this limitation by using spectral graph convolution on a local graph, combined with a novel graph pooling strategy. In our approach, graph convolution is carried out on a nearest neighbor graph constructed from a point's neighborhood, such that features are jointly learned. We replace the standard max pooling step with a recursive clustering and pooling strategy, devised to aggregate information from within clusters of nodes that are close to one another in their spectral coordinates, leading to richer overall feature descriptors. Through extensive experiments on diverse datasets, we show a consistent demonstrable advantage for the tasks of both point set classification and segmentation.