 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAverage Outward Flux Skeletons for Environment Mapping and Topology Matching
Paper and Code
Nov 27, 2021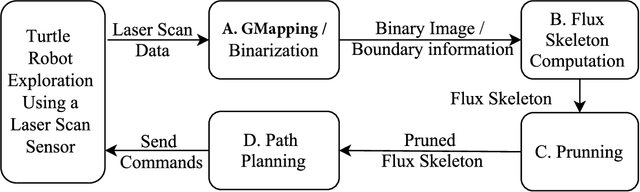
We consider how to directly extract a road map (also known as a topological representation) of an initially-unknown 2-dimensional environment via an online procedure that robustly computes a retraction of its boundaries. In this article, we first present the online construction of a topological map and the implementation of a control law for guiding the robot to the nearest unexplored area, first presented in [1]. The proposed method operates by allowing the robot to localize itself on a partially constructed map, calculate a path to unexplored parts of the environment (frontiers), compute a robust terminating condition when the robot has fully explored the environment, and achieve loop closure detection. The proposed algorithm results in smooth safe paths for the robot's navigation needs. The presented approach is any time algorithm that has the advantage that it allows for the active creation of topological maps from laser scan data, as it is being acquired. We also propose a navigation strategy based on a heuristic where the robot is directed towards nodes in the topological map that open to empty space. We then extend the work in [1] by presenting a topology matching algorithm that leverages the strengths of a particular spectral correspondence method [2], to match the mapped environments generated from our topology-making algorithm. Here, we concentrated on implementing a system that could be used to match the topologies of the mapped environment by using AOF Skeletons. In topology matching between two given maps and their AOF skeletons, we first find correspondences between points on the AOF skeletons of two different environments. We then align the (2D) points of the environments themselves. We also compute a distance measure between two given environments, based on their extracted AOF skeletons and their topology, as the sum of the matching errors between corresponding points.