 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocal Spectral Graph Convolution for Point Set Feature Learning
Paper and Code
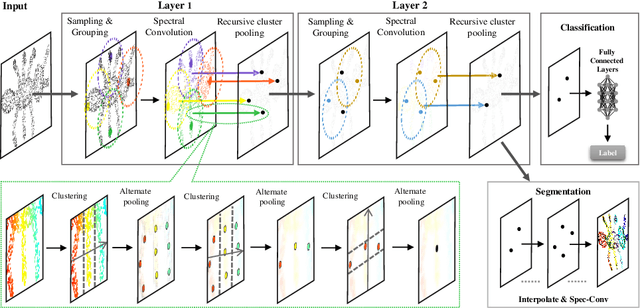

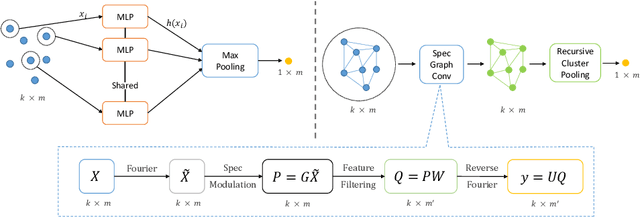
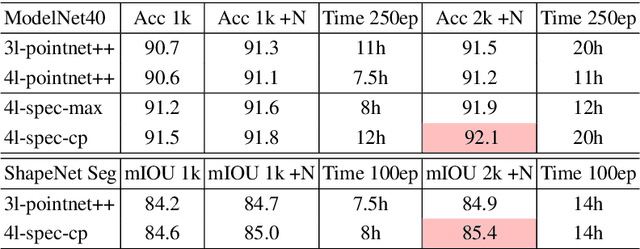
Feature learning on point clouds has shown great promise, with the introduction of effective and generalizable deep learning frameworks such as pointnet++. Thus far, however, point features have been abstracted in an independent and isolated manner, ignoring the relative layout of neighboring points as well as their features. In the present article, we propose to overcome this limitation by using spectral graph convolution on a local graph, combined with a novel graph pooling strategy. In our approach, graph convolution is carried out on a nearest neighbor graph constructed from a point's neighborhood, such that features are jointly learned. We replace the standard max pooling step with a recursive clustering and pooling strategy, devised to aggregate information from within clusters of nodes that are close to one another in their spectral coordinates, leading to richer overall feature descriptors. Through extensive experiments on diverse datasets, we show a consistent demonstrable advantage for the tasks of both point set classification and segmentation.