 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Self-body Image Acquisition Considering Changes in Muscle Routes Caused by Softness of Body Tissue for Tendon-driven Musculoskeletal Humanoids
Apr 08, 2024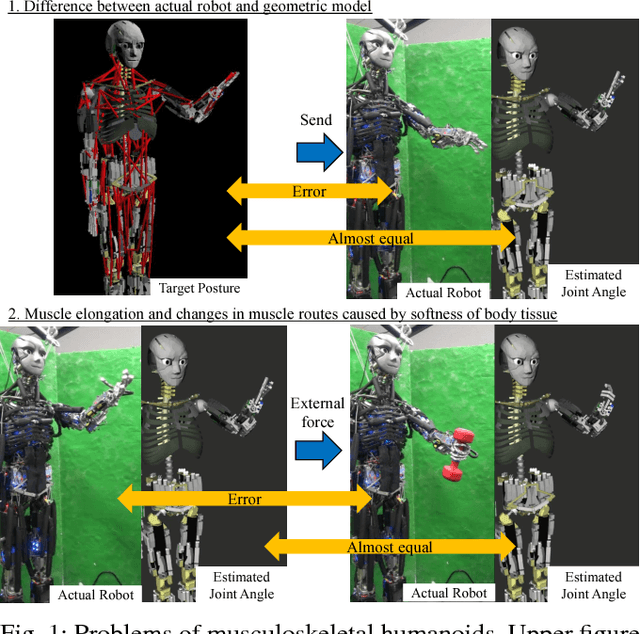
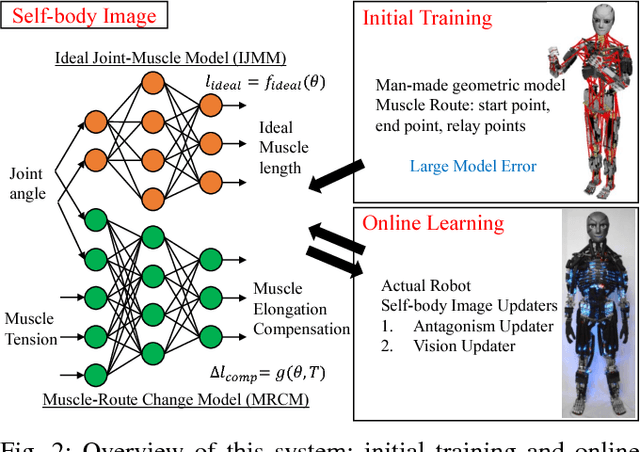
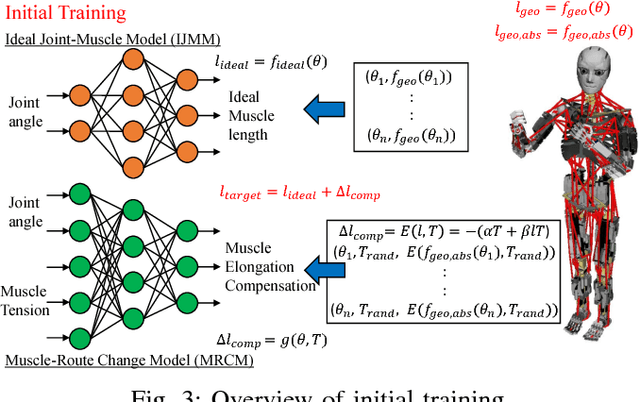
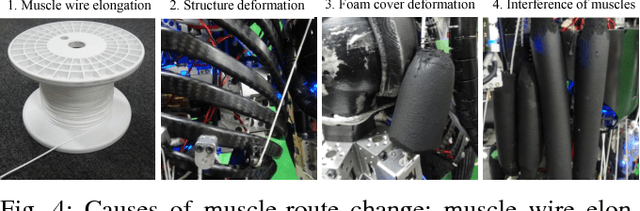
Tendon-driven musculoskeletal humanoids have many benefits in terms of the flexible spine, multiple degrees of freedom, and variable stiffness. At the same time, because of its body complexity, there are problems in controllability. First, due to the large difference between the actual robot and its geometric model, it cannot move as intended and large internal muscle tension may emerge. Second, movements which do not appear as changes in muscle lengths may emerge, because of the muscle route changes caused by softness of body tissue. To solve these problems, we construct two models: ideal joint-muscle model and muscle-route change model, using a neural network. We initialize these models by a man-made geometric model and update them online using the sensor information of the actual robot. We validate that the tendon-driven musculoskeletal humanoid Kengoro is able to obtain a correct self-body image through several experiments.
Five-fingered Hand with Wide Range of Thumb Using Combination of Machined Springs and Variable Stiffness Joints
Mar 26, 2024



Human hands can not only grasp objects of various shape and size and manipulate them in hands but also exert such a large gripping force that they can support the body in the situations such as dangling a bar and climbing a ladder. On the other hand, it is difficult for most robot hands to manage both. Therefore in this paper we developed the hand which can grasp various objects and exert large gripping force. To develop such hand, we focused on the thumb CM joint with wide range of motion and the MP joints of four fingers with the DOF of abduction and adduction. Based on the hand with large gripping force and flexibility using machined spring, we applied above mentioned joint mechanism to the hand. The thumb CM joint has wide range of motion because of the combination of three machined springs and MP joints of four fingers have variable rigidity mechanism instead of driving each joint independently in order to move joint in limited space and by limited actuators. Using the developed hand, we achieved the grasping of various objects, supporting a large load and several motions with an arm.