 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMind The Edge: Refining Depth Edges in Sparsely-Supervised Monocular Depth Estimation
Dec 10, 2022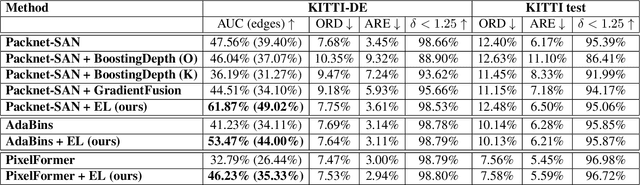



Monocular Depth Estimation (MDE) is a fundamental problem in computer vision with numerous applications. Recently, LIDAR-supervised methods have achieved remarkable per-pixel depth accuracy in outdoor scenes. However, significant errors are typically found in the proximity of depth discontinuities, i.e., depth edges, which often hinder the performance of depth-dependent applications that are sensitive to such inaccuracies, e.g., novel view synthesis and augmented reality. Since direct supervision for the location of depth edges is typically unavailable in sparse LIDAR-based scenes, encouraging the MDE model to produce correct depth edges is not straightforward. In this work we propose to learn to detect the location of depth edges from densely-supervised synthetic data, and use it to generate supervision for the depth edges in the MDE training. %Despite the 'domain gap' between synthetic and real data, we show that depth edges that are estimated directly are significantly more accurate than the ones that emerge indirectly from the MDE training. To quantitatively evaluate our approach, and due to the lack of depth edges ground truth in LIDAR-based scenes, we manually annotated subsets of the KITTI and the DDAD datasets with depth edges ground truth. We demonstrate significant gains in the accuracy of the depth edges with comparable per-pixel depth accuracy on several challenging datasets.
Long-term Planning by Short-term Prediction
Feb 04, 2016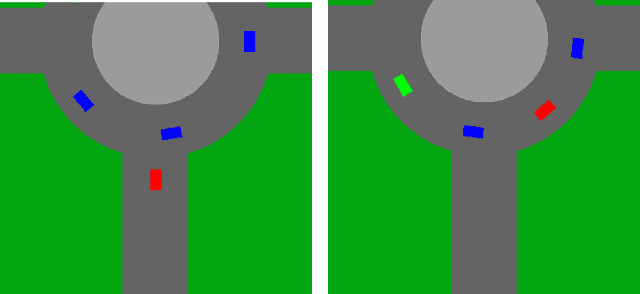
We consider planning problems, that often arise in autonomous driving applications, in which an agent should decide on immediate actions so as to optimize a long term objective. For example, when a car tries to merge in a roundabout it should decide on an immediate acceleration/braking command, while the long term effect of the command is the success/failure of the merge. Such problems are characterized by continuous state and action spaces, and by interaction with multiple agents, whose behavior can be adversarial. We argue that dual versions of the MDP framework (that depend on the value function and the $Q$ function) are problematic for autonomous driving applications due to the non Markovian of the natural state space representation, and due to the continuous state and action spaces. We propose to tackle the planning task by decomposing the problem into two phases: First, we apply supervised learning for predicting the near future based on the present. We require that the predictor will be differentiable with respect to the representation of the present. Second, we model a full trajectory of the agent using a recurrent neural network, where unexplained factors are modeled as (additive) input nodes. This allows us to solve the long-term planning problem using supervised learning techniques and direct optimization over the recurrent neural network. Our approach enables us to learn robust policies by incorporating adversarial elements to the environment.