 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTeledrive: An Embodied AI based Telepresence System
Jun 01, 2024



This article presents Teledrive, a telepresence robotic system with embodied AI features that empowers an operator to navigate the telerobot in any unknown remote place with minimal human intervention. We conceive Teledrive in the context of democratizing remote care-giving for elderly citizens as well as for isolated patients, affected by contagious diseases. In particular, this paper focuses on the problem of navigating to a rough target area (like bedroom or kitchen) rather than pre-specified point destinations. This ushers in a unique AreaGoal based navigation feature, which has not been explored in depth in the contemporary solutions. Further, we describe an edge computing-based software system built on a WebRTC-based communication framework to realize the aforementioned scheme through an easy-to-use speech-based human-robot interaction. Moreover, to enhance the ease of operation for the remote caregiver, we incorporate a person following feature, whereby a robot follows a person on the move in its premises as directed by the operator. Moreover, the system presented is loosely coupled with specific robot hardware, unlike the existing solutions. We have evaluated the efficacy of the proposed system through baseline experiments, user study, and real-life deployment.
* Accepted in Journal of Intelligent Robotic System
A Perspective on Robotic Telepresence and Teleoperation using Cognition: Are we there yet?
Mar 06, 2022

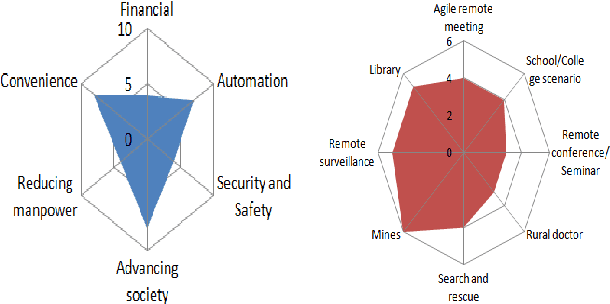

Telepresence and teleoperation robotics have attracted a great amount of attention in the last 10 years. With the Artificial Intelligence (AI) revolution already being started, we can see a wide range of robotic applications being realized. Intelligent robotic systems are being deployed both in industrial and domestic environments. Telepresence is the idea of being present in a remote location virtually or via robotic avatars. Similarly, the idea of operating a robot from a remote location for various tasks is called teleoperation. These technologies find significant application in health care, education, surveillance, disaster recovery, and corporate/government sectors. But question still remains about their maturity, security and safety levels. We also need to think about enhancing the user experience and trust in such technologies going into the next generation of computing.
Demo: Edge-centric Telepresence Avatar Robot for Geographically Distributed Environment
Jul 25, 2020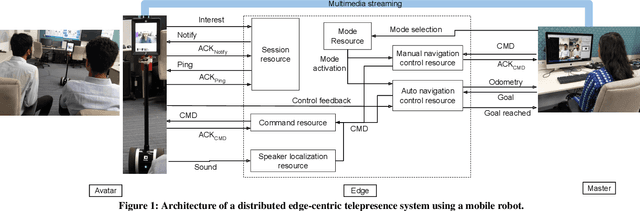
Using a robotic platform for telepresence applications has gained paramount importance in this decade. Scenarios such as remote meetings, group discussions, and presentations/talks in seminars and conferences get much attention in this regard. Though there exist some robotic platforms for such telepresence applications, they lack efficacy in communication and interaction between the remote person and the avatar robot deployed in another geographic location. Also, such existing systems are often cloud-centric which adds to its network overhead woes. In this demo, we develop and test a framework that brings the best of both cloud and edge-centric systems together along with a newly designed communication protocol. Our solution adds to the improvement of the existing systems in terms of robustness and efficacy in communication for a geographically distributed environment.