 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Extensible Benchmark Suite for Learning to Simulate Physical Systems
Aug 09, 2021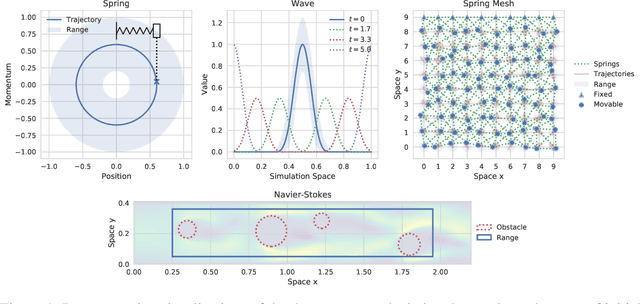
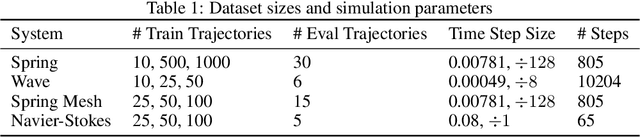
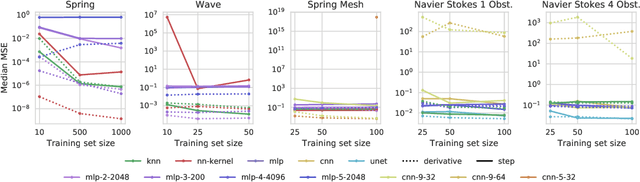
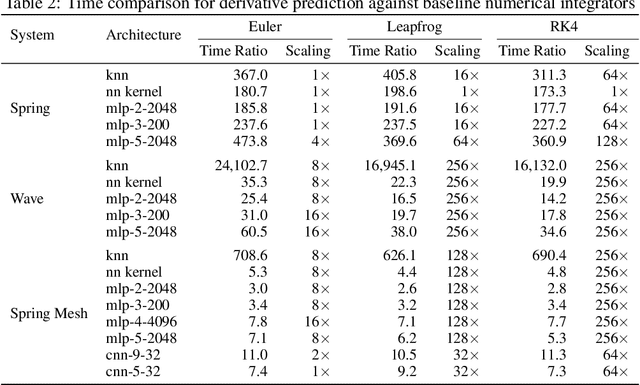
Simulating physical systems is a core component of scientific computing, encompassing a wide range of physical domains and applications. Recently, there has been a surge in data-driven methods to complement traditional numerical simulations methods, motivated by the opportunity to reduce computational costs and/or learn new physical models leveraging access to large collections of data. However, the diversity of problem settings and applications has led to a plethora of approaches, each one evaluated on a different setup and with different evaluation metrics. We introduce a set of benchmark problems to take a step towards unified benchmarks and evaluation protocols. We propose four representative physical systems, as well as a collection of both widely used classical time integrators and representative data-driven methods (kernel-based, MLP, CNN, nearest neighbors). Our framework allows evaluating objectively and systematically the stability, accuracy, and computational efficiency of data-driven methods. Additionally, it is configurable to permit adjustments for accommodating other learning tasks and for establishing a foundation for future developments in machine learning for scientific computing.
The iWildCam 2020 Competition Dataset
Apr 21, 2020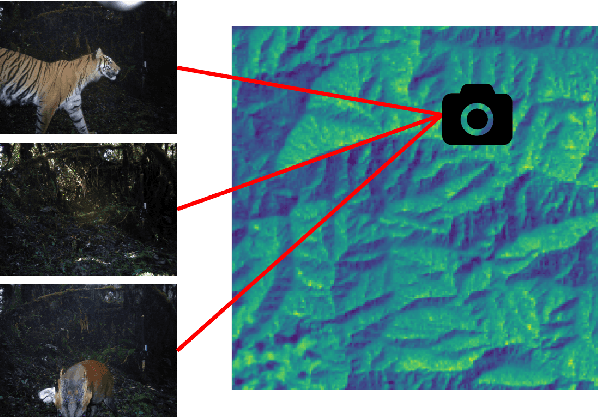
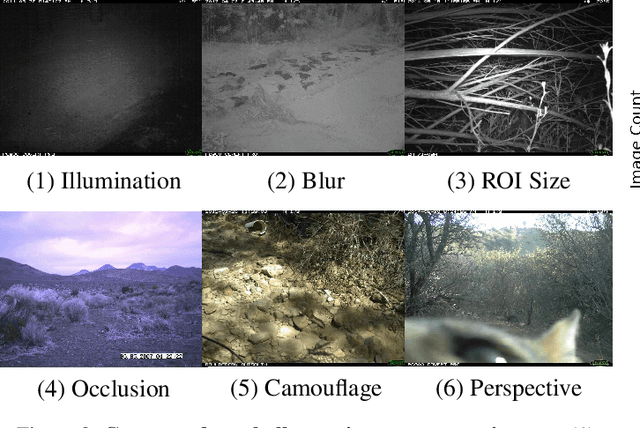
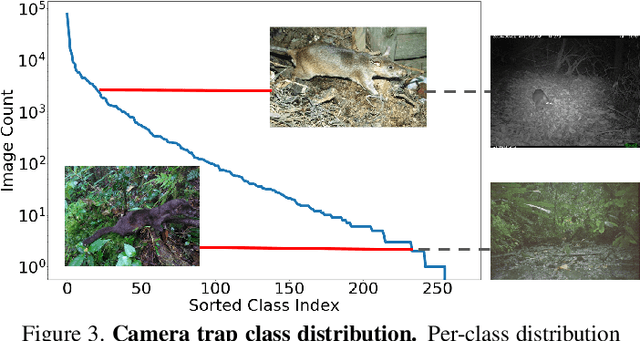
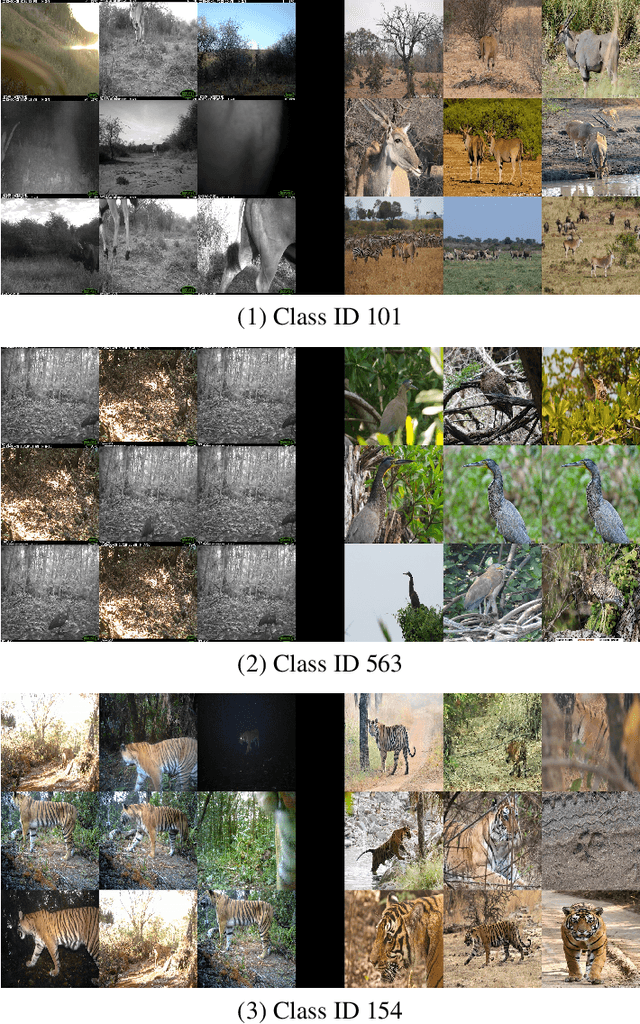
Camera traps enable the automatic collection of large quantities of image data. Biologists all over the world use camera traps to monitor animal populations. We have recently been making strides towards automatic species classification in camera trap images. However, as we try to expand the geographic scope of these models we are faced with an interesting question: how do we train models that perform well on new (unseen during training) camera trap locations? Can we leverage data from other modalities, such as citizen science data and remote sensing data? In order to tackle this problem, we have prepared a challenge where the training data and test data are from different cameras spread across the globe. For each camera, we provide a series of remote sensing imagery that is tied to the location of the camera. We also provide citizen science imagery from the set of species seen in our data. The challenge is to correctly classify species in the test camera traps.