 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUAV-Based Infrastructure Inspections: A Literature Review and Proposed Framework for AEC+FM
Jan 16, 2026Unmanned Aerial Vehicles (UAVs) are transforming infrastructure inspections in the Architecture, Engineering, Construction, and Facility Management (AEC+FM) domain. By synthesizing insights from over 150 studies, this review paper highlights UAV-based methodologies for data acquisition, photogrammetric modeling, defect detection, and decision-making support. Key innovations include path optimization, thermal integration, and advanced machine learning (ML) models such as YOLO and Faster R-CNN for anomaly detection. UAVs have demonstrated value in structural health monitoring (SHM), disaster response, urban infrastructure management, energy efficiency evaluations, and cultural heritage preservation. Despite these advancements, challenges in real-time processing, multimodal data fusion, and generalizability remain. A proposed workflow framework, informed by literature and a case study, integrates RGB imagery, LiDAR, and thermal sensing with transformer-based architectures to improve accuracy and reliability in detecting structural defects, thermal anomalies, and geometric inconsistencies. The proposed framework ensures precise and actionable insights by fusing multimodal data and dynamically adapting path planning for complex environments, presented as a comprehensive step-by-step guide to address these challenges effectively. This paper concludes with future research directions emphasizing lightweight AI models, adaptive flight planning, synthetic datasets, and richer modality fusion to streamline modern infrastructure inspections.
Real-Time Roadway Obstacle Detection for Electric Scooters Using Deep Learning and Multi-Sensor Fusion
Apr 04, 2025



The increasing adoption of electric scooters (e-scooters) in urban areas has coincided with a rise in traffic accidents and injuries, largely due to their small wheels, lack of suspension, and sensitivity to uneven surfaces. While deep learning-based object detection has been widely used to improve automobile safety, its application for e-scooter obstacle detection remains unexplored. This study introduces a novel ground obstacle detection system for e-scooters, integrating an RGB camera, and a depth camera to enhance real-time road hazard detection. Additionally, the Inertial Measurement Unit (IMU) measures linear vertical acceleration to identify surface vibrations, guiding the selection of six obstacle categories: tree branches, manhole covers, potholes, pine cones, non-directional cracks, and truncated domes. All sensors, including the RGB camera, depth camera, and IMU, are integrated within the Intel RealSense Camera D435i. A deep learning model powered by YOLO detects road hazards and utilizes depth data to estimate obstacle proximity. Evaluated on the seven hours of naturalistic riding dataset, the system achieves a high mean average precision (mAP) of 0.827 and demonstrates excellent real-time performance. This approach provides an effective solution to enhance e-scooter safety through advanced computer vision and data fusion. The dataset is accessible at https://zenodo.org/records/14583718, and the project code is hosted on https://github.com/Zeyang-Zheng/Real-Time-Roadway-Obstacle-Detection-for-Electric-Scooters.
Multimodal Data Integration for Sustainable Indoor Gardening: Tracking Anyplant with Time Series Foundation Model
Mar 27, 2025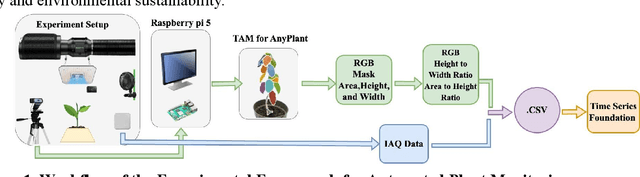
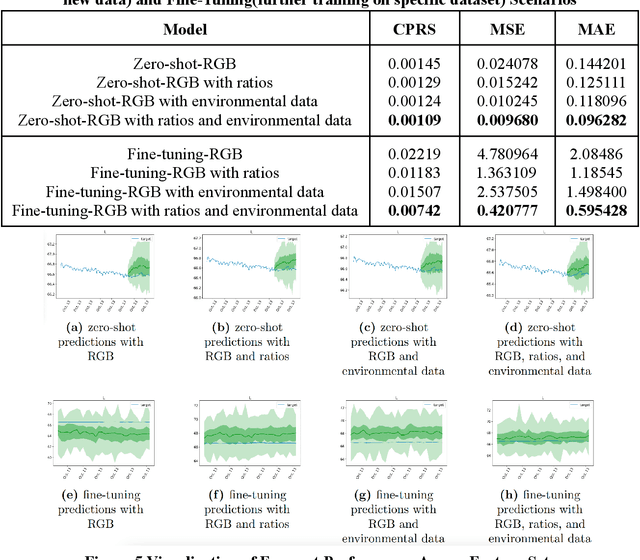

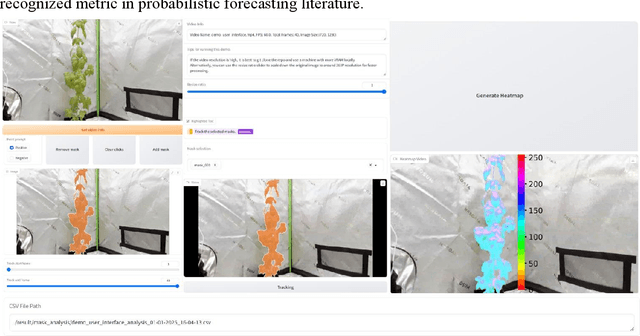
Indoor gardening within sustainable buildings offers a transformative solution to urban food security and environmental sustainability. By 2030, urban farming, including Controlled Environment Agriculture (CEA) and vertical farming, is expected to grow at a compound annual growth rate (CAGR) of 13.2% from 2024 to 2030, according to market reports. This growth is fueled by advancements in Internet of Things (IoT) technologies, sustainable innovations such as smart growing systems, and the rising interest in green interior design. This paper presents a novel framework that integrates computer vision, machine learning (ML), and environmental sensing for the automated monitoring of plant health and growth. Unlike previous approaches, this framework combines RGB imagery, plant phenotyping data, and environmental factors such as temperature and humidity, to predict plant water stress in a controlled growth environment. The system utilizes high-resolution cameras to extract phenotypic features, such as RGB, plant area, height, and width while employing the Lag-Llama time series model to analyze and predict water stress. Experimental results demonstrate that integrating RGB, size ratios, and environmental data significantly enhances predictive accuracy, with the Fine-tuned model achieving the lowest errors (MSE = 0.420777, MAE = 0.595428) and reduced uncertainty. These findings highlight the potential of multimodal data and intelligent systems to automate plant care, optimize resource consumption, and align indoor gardening with sustainable building management practices, paving the way for resilient, green urban spaces.
Performance Evaluation of Real-Time Object Detection for Electric Scooters
May 05, 2024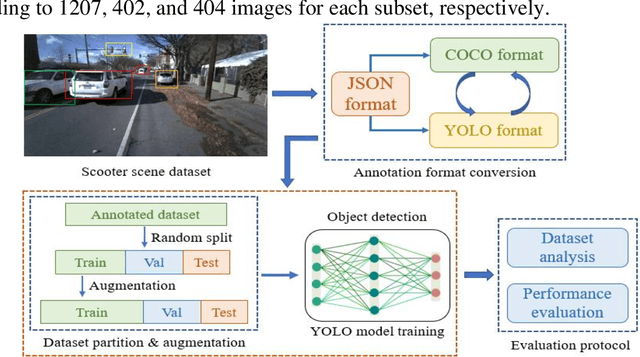
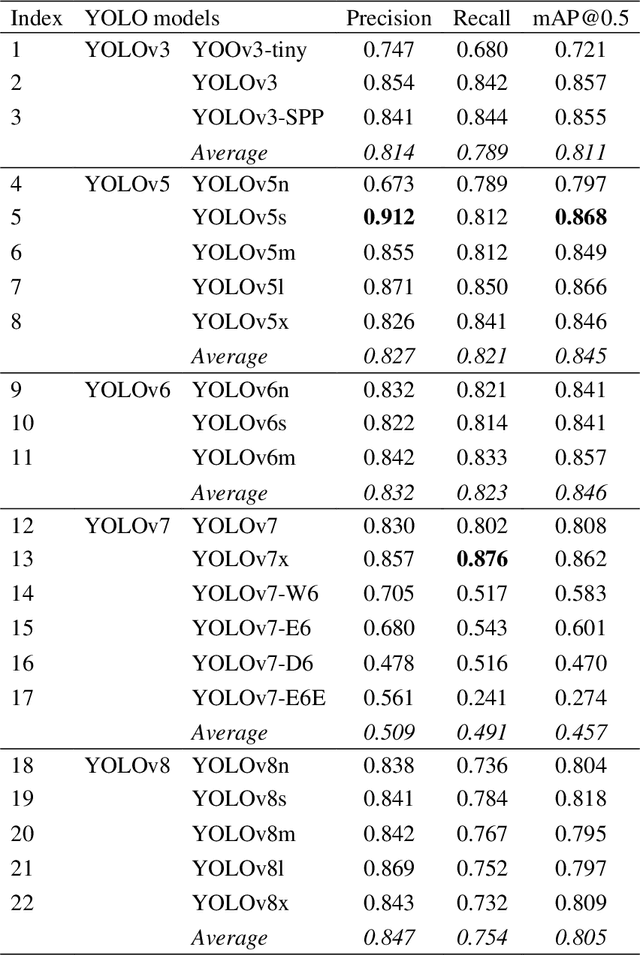
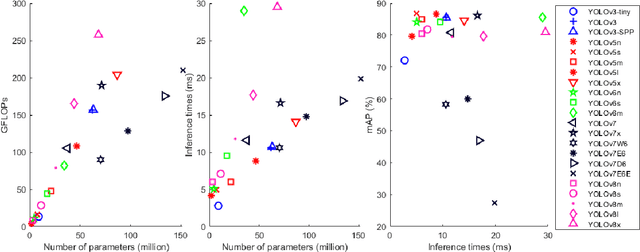
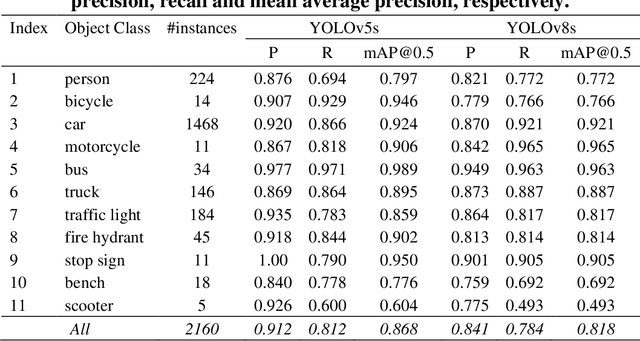
Electric scooters (e-scooters) have rapidly emerged as a popular mode of transportation in urban areas, yet they pose significant safety challenges. In the United States, the rise of e-scooters has been marked by a concerning increase in related injuries and fatalities. Recently, while deep-learning object detection holds paramount significance in autonomous vehicles to avoid potential collisions, its application in the context of e-scooters remains relatively unexplored. This paper addresses this gap by assessing the effectiveness and efficiency of cutting-edge object detectors designed for e-scooters. To achieve this, the first comprehensive benchmark involving 22 state-of-the-art YOLO object detectors, including five versions (YOLOv3, YOLOv5, YOLOv6, YOLOv7, and YOLOv8), has been established for real-time traffic object detection using a self-collected dataset featuring e-scooters. The detection accuracy, measured in terms of mAP@0.5, ranges from 27.4% (YOLOv7-E6E) to 86.8% (YOLOv5s). All YOLO models, particularly YOLOv3-tiny, have displayed promising potential for real-time object detection in the context of e-scooters. Both the traffic scene dataset (https://zenodo.org/records/10578641) and software program codes (https://github.com/DongChen06/ScooterDet) for model benchmarking in this study are publicly available, which will not only improve e-scooter safety with advanced object detection but also lay the groundwork for tailored solutions, promising a safer and more sustainable urban micromobility landscape.
WcDT: World-centric Diffusion Transformer for Traffic Scene Generation
Apr 02, 2024



In this paper, we introduce a novel approach for autonomous driving trajectory generation by harnessing the complementary strengths of diffusion probabilistic models (a.k.a., diffusion models) and transformers. Our proposed framework, termed the "World-Centric Diffusion Transformer" (WcDT), optimizes the entire trajectory generation process, from feature extraction to model inference. To enhance the scene diversity and stochasticity, the historical trajectory data is first preprocessed and encoded into latent space using Denoising Diffusion Probabilistic Models (DDPM) enhanced with Diffusion with Transformer (DiT) blocks. Then, the latent features, historical trajectories, HD map features, and historical traffic signal information are fused with various transformer-based encoders. The encoded traffic scenes are then decoded by a trajectory decoder to generate multimodal future trajectories. Comprehensive experimental results show that the proposed approach exhibits superior performance in generating both realistic and diverse trajectories, showing its potential for integration into automatic driving simulation systems.
Building Performance Simulations Can Inform IoT Privacy Leaks in Buildings
Mar 26, 2023As IoT devices become cheaper, smaller, and more ubiquitously deployed, they can reveal more information than their intended design and threaten user privacy. Indoor Environmental Quality (IEQ) sensors previously installed for energy savings and indoor health monitoring have emerged as an avenue to infer sensitive occupant information. For example, light sensors are a known conduit for inspecting room occupancy status with motion-sensitive lights. Light signals can also infer sensitive data such as occupant identity and digital screen information. To limit sensor overreach, we explore the selection of sensor placements as a methodology. Specifically, in this proof-of-concept exploration, we demonstrate the potential of physics-based simulation models to quantify the minimal number of positions necessary to capture sensitive inferences. We show how a single well-placed sensor can be sufficient in specific building contexts to holistically capture its environmental states and how additional well-placed sensors can contribute to more granular inferences. We contribute a device-agnostic and building-adaptive workflow to respectfully capture inferable occupant activity and elaborate on the implications of incorporating building simulations into sensing schemes in the real world.
Using Statistical Models to Detect Occupancy in Buildings through Monitoring VOC, CO$_2$, and other Environmental Factors
Mar 07, 2022
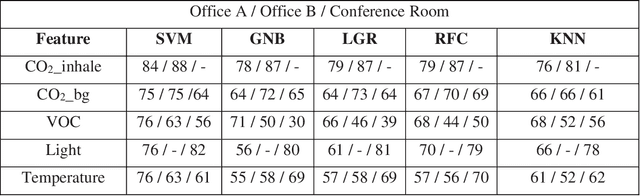
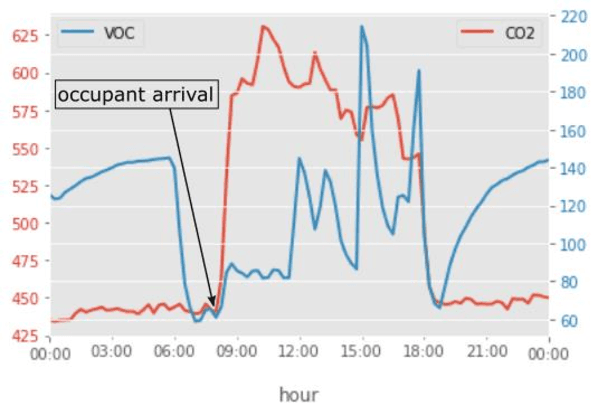
Dynamic models of occupancy patterns have shown to be effective in optimizing building-systems operations. Previous research has relied on CO$_2$ sensors and vision-based techniques to determine occupancy patterns. Vision-based techniques provide highly accurate information; however, they are very intrusive. Therefore, motion or CO$_2$ sensors are more widely adopted worldwide. Volatile Organic Compounds (VOCs) are another pollutant originating from the occupants. However, a limited number of studies have evaluated the impact of occupants on the VOC level. In this paper, continuous measurements of CO$_2$, VOC, light, temperature, and humidity were recorded in a 17,000 sqft open office space for around four months. Using different statistical models (e.g., SVM, K-Nearest Neighbors, and Random Forest) we evaluated which combination of environmental factors provides more accurate insights on occupant presence. Our preliminary results indicate that VOC is a good indicator of occupancy detection in some cases. It is also concluded that proper feature selection and developing appropriate global occupancy detection models can reduce the cost and energy of data collection without a significant impact on accuracy.