 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Roadway Obstacle Detection for Electric Scooters Using Deep Learning and Multi-Sensor Fusion
Apr 04, 2025



The increasing adoption of electric scooters (e-scooters) in urban areas has coincided with a rise in traffic accidents and injuries, largely due to their small wheels, lack of suspension, and sensitivity to uneven surfaces. While deep learning-based object detection has been widely used to improve automobile safety, its application for e-scooter obstacle detection remains unexplored. This study introduces a novel ground obstacle detection system for e-scooters, integrating an RGB camera, and a depth camera to enhance real-time road hazard detection. Additionally, the Inertial Measurement Unit (IMU) measures linear vertical acceleration to identify surface vibrations, guiding the selection of six obstacle categories: tree branches, manhole covers, potholes, pine cones, non-directional cracks, and truncated domes. All sensors, including the RGB camera, depth camera, and IMU, are integrated within the Intel RealSense Camera D435i. A deep learning model powered by YOLO detects road hazards and utilizes depth data to estimate obstacle proximity. Evaluated on the seven hours of naturalistic riding dataset, the system achieves a high mean average precision (mAP) of 0.827 and demonstrates excellent real-time performance. This approach provides an effective solution to enhance e-scooter safety through advanced computer vision and data fusion. The dataset is accessible at https://zenodo.org/records/14583718, and the project code is hosted on https://github.com/Zeyang-Zheng/Real-Time-Roadway-Obstacle-Detection-for-Electric-Scooters.
Multi-Agent Deep Q-Network with Layer-based Communication Channel for Autonomous Internal Logistics Vehicle Scheduling in Smart Manufacturing
Nov 01, 2024In smart manufacturing, scheduling autonomous internal logistic vehicles is crucial for optimizing operational efficiency. This paper proposes a multi-agent deep Q-network (MADQN) with a layer-based communication channel (LBCC) to address this challenge. The main goals are to minimize total job tardiness, reduce the number of tardy jobs, and lower vehicle energy consumption. The method is evaluated against nine well-known scheduling heuristics, demonstrating its effectiveness in handling dynamic job shop behaviors like job arrivals and workstation unavailabilities. The approach also proves scalable, maintaining performance across different layouts and larger problem instances, highlighting the robustness and adaptability of MADQN with LBCC in smart manufacturing.
Performance Evaluation of Real-Time Object Detection for Electric Scooters
May 05, 2024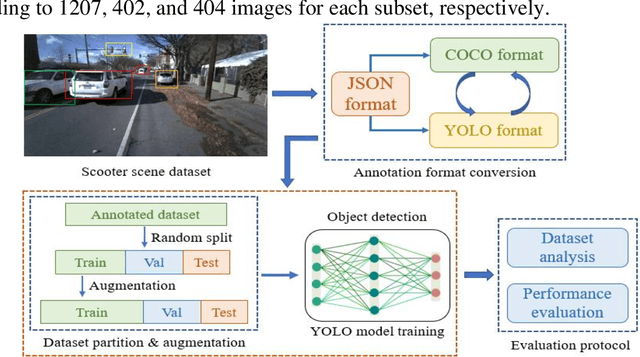
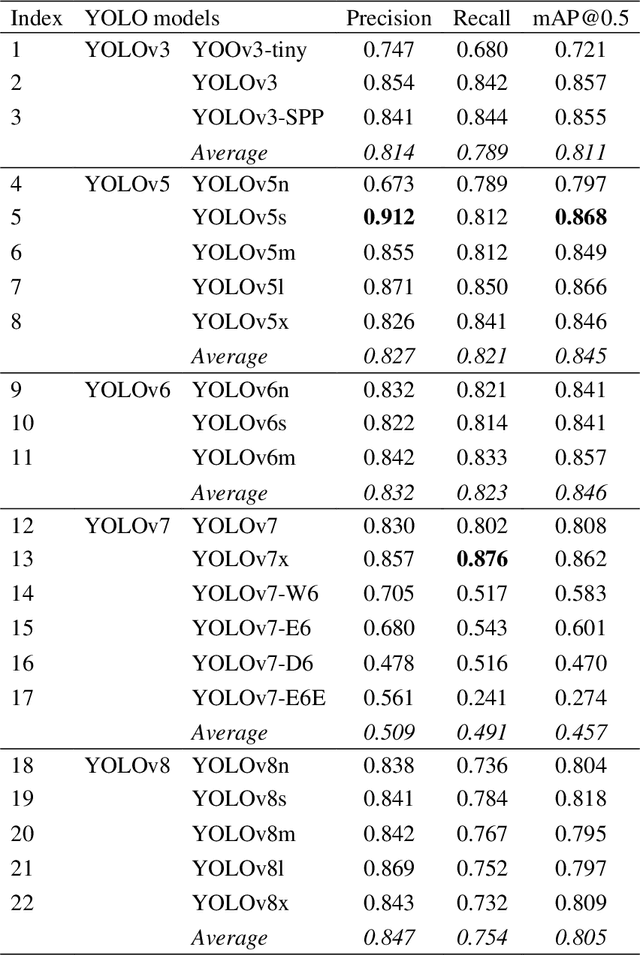
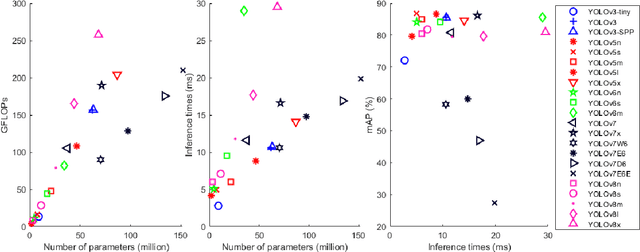
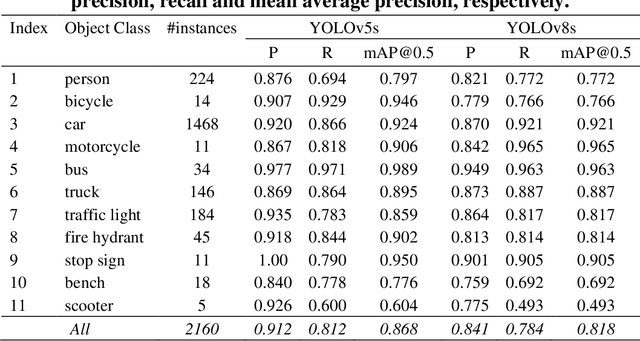
Electric scooters (e-scooters) have rapidly emerged as a popular mode of transportation in urban areas, yet they pose significant safety challenges. In the United States, the rise of e-scooters has been marked by a concerning increase in related injuries and fatalities. Recently, while deep-learning object detection holds paramount significance in autonomous vehicles to avoid potential collisions, its application in the context of e-scooters remains relatively unexplored. This paper addresses this gap by assessing the effectiveness and efficiency of cutting-edge object detectors designed for e-scooters. To achieve this, the first comprehensive benchmark involving 22 state-of-the-art YOLO object detectors, including five versions (YOLOv3, YOLOv5, YOLOv6, YOLOv7, and YOLOv8), has been established for real-time traffic object detection using a self-collected dataset featuring e-scooters. The detection accuracy, measured in terms of mAP@0.5, ranges from 27.4% (YOLOv7-E6E) to 86.8% (YOLOv5s). All YOLO models, particularly YOLOv3-tiny, have displayed promising potential for real-time object detection in the context of e-scooters. Both the traffic scene dataset (https://zenodo.org/records/10578641) and software program codes (https://github.com/DongChen06/ScooterDet) for model benchmarking in this study are publicly available, which will not only improve e-scooter safety with advanced object detection but also lay the groundwork for tailored solutions, promising a safer and more sustainable urban micromobility landscape.