 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUAV-Based Infrastructure Inspections: A Literature Review and Proposed Framework for AEC+FM
Jan 16, 2026Unmanned Aerial Vehicles (UAVs) are transforming infrastructure inspections in the Architecture, Engineering, Construction, and Facility Management (AEC+FM) domain. By synthesizing insights from over 150 studies, this review paper highlights UAV-based methodologies for data acquisition, photogrammetric modeling, defect detection, and decision-making support. Key innovations include path optimization, thermal integration, and advanced machine learning (ML) models such as YOLO and Faster R-CNN for anomaly detection. UAVs have demonstrated value in structural health monitoring (SHM), disaster response, urban infrastructure management, energy efficiency evaluations, and cultural heritage preservation. Despite these advancements, challenges in real-time processing, multimodal data fusion, and generalizability remain. A proposed workflow framework, informed by literature and a case study, integrates RGB imagery, LiDAR, and thermal sensing with transformer-based architectures to improve accuracy and reliability in detecting structural defects, thermal anomalies, and geometric inconsistencies. The proposed framework ensures precise and actionable insights by fusing multimodal data and dynamically adapting path planning for complex environments, presented as a comprehensive step-by-step guide to address these challenges effectively. This paper concludes with future research directions emphasizing lightweight AI models, adaptive flight planning, synthetic datasets, and richer modality fusion to streamline modern infrastructure inspections.
Performance Evaluation of Real-Time Object Detection for Electric Scooters
May 05, 2024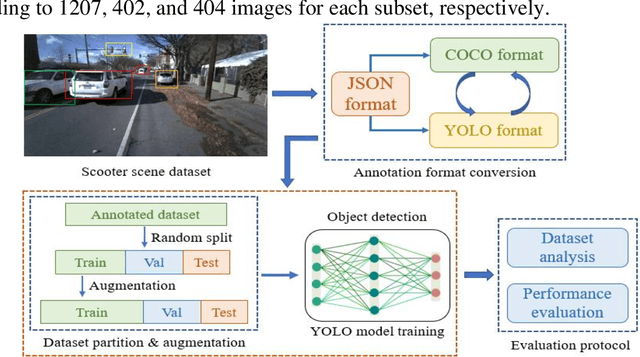
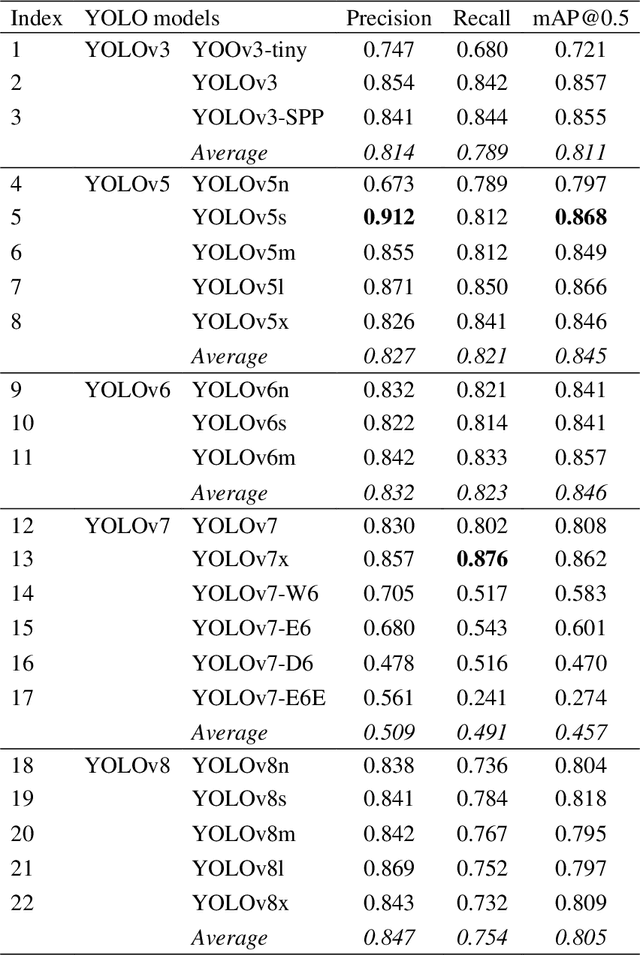
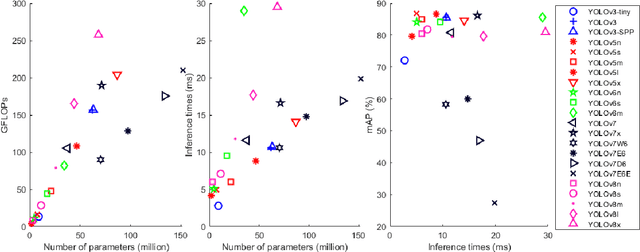
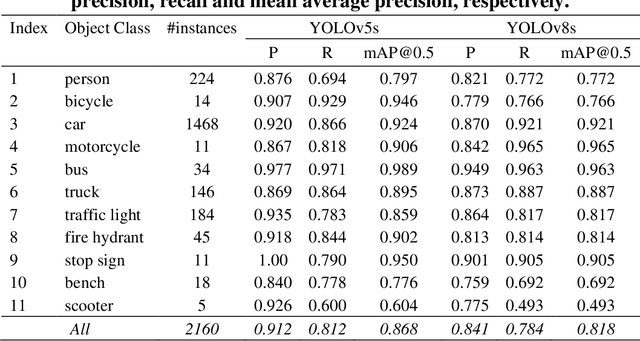
Electric scooters (e-scooters) have rapidly emerged as a popular mode of transportation in urban areas, yet they pose significant safety challenges. In the United States, the rise of e-scooters has been marked by a concerning increase in related injuries and fatalities. Recently, while deep-learning object detection holds paramount significance in autonomous vehicles to avoid potential collisions, its application in the context of e-scooters remains relatively unexplored. This paper addresses this gap by assessing the effectiveness and efficiency of cutting-edge object detectors designed for e-scooters. To achieve this, the first comprehensive benchmark involving 22 state-of-the-art YOLO object detectors, including five versions (YOLOv3, YOLOv5, YOLOv6, YOLOv7, and YOLOv8), has been established for real-time traffic object detection using a self-collected dataset featuring e-scooters. The detection accuracy, measured in terms of mAP@0.5, ranges from 27.4% (YOLOv7-E6E) to 86.8% (YOLOv5s). All YOLO models, particularly YOLOv3-tiny, have displayed promising potential for real-time object detection in the context of e-scooters. Both the traffic scene dataset (https://zenodo.org/records/10578641) and software program codes (https://github.com/DongChen06/ScooterDet) for model benchmarking in this study are publicly available, which will not only improve e-scooter safety with advanced object detection but also lay the groundwork for tailored solutions, promising a safer and more sustainable urban micromobility landscape.