 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIncorporating dense metric depth into neural 3D representations for view synthesis and relighting
Sep 04, 2024



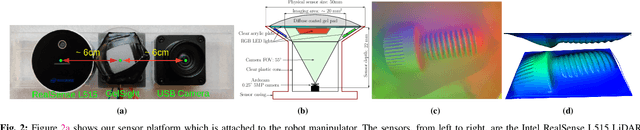
Synthesizing accurate geometry and photo-realistic appearance of small scenes is an active area of research with compelling use cases in gaming, virtual reality, robotic-manipulation, autonomous driving, convenient product capture, and consumer-level photography. When applying scene geometry and appearance estimation techniques to robotics, we found that the narrow cone of possible viewpoints due to the limited range of robot motion and scene clutter caused current estimation techniques to produce poor quality estimates or even fail. On the other hand, in robotic applications, dense metric depth can often be measured directly using stereo and illumination can be controlled. Depth can provide a good initial estimate of the object geometry to improve reconstruction, while multi-illumination images can facilitate relighting. In this work we demonstrate a method to incorporate dense metric depth into the training of neural 3D representations and address an artifact observed while jointly refining geometry and appearance by disambiguating between texture and geometry edges. We also discuss a multi-flash stereo camera system developed to capture the necessary data for our pipeline and show results on relighting and view synthesis with a few training views.
Controlled illumination for perception and manipulation of Lambertian objects
Apr 24, 2023


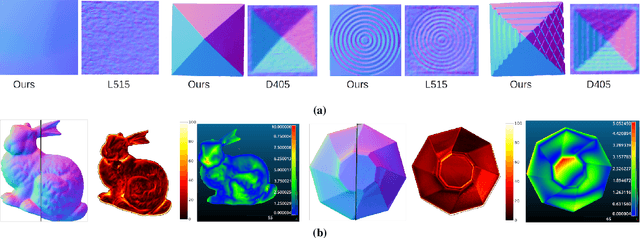
Controlling illumination can generate high quality information about object surface normals and depth discontinuities at a low computational cost. In this work we demonstrate a robot workspace-scaled controlled illumination approach that generates high quality information for table top scale objects for robotic manipulation. With our low angle of incidence directional illumination approach we can precisely capture surface normals and depth discontinuities of Lambertian objects. We demonstrate three use cases of our approach for robotic manipulation. We show that 1) by using the captured information we can perform general purpose grasping with a single point vacuum gripper, 2) we can visually measure the deformation of known objects, and 3) we can estimate pose of known objects and track unknown objects in the robot's workspace. Additional demonstrations of the results presented in the work can be viewed on the project webpage https://anonymousprojectsite.github.io/.
Using Collocated Vision and Tactile Sensors for Visual Servoing and Localization
Apr 27, 2022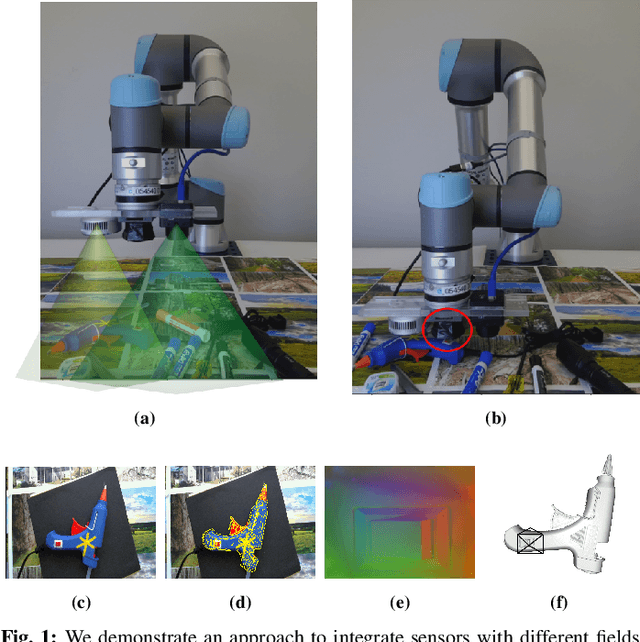


Coordinating proximity and tactile imaging by collocating cameras with tactile sensors can 1) provide useful information before contact such as object pose estimates and visually servo a robot to a target with reduced occlusion and higher resolution compared to head-mounted or external depth cameras, 2) simplify the contact point and pose estimation problems and help tactile sensing avoid erroneous matches when a surface does not have significant texture or has repetitive texture with many possible matches, and 3) use tactile imaging to further refine contact point and object pose estimation. We demonstrate our results with objects that have more surface texture than most objects in standard manipulation datasets. We learn that optic flow needs to be integrated over a substantial amount of camera travel to be useful in predicting movement direction. Most importantly, we also learn that state of the art vision algorithms do not do a good job localizing tactile images on object models, unless a reasonable prior can be provided from collocated cameras.
* This archival version of the manuscript is significantly different in content from the reviewed and published version. The published version can be accessed here: https://ieeexplore.ieee.org/document/9699405. Supplementary materials can be accessed here: https://arkadeepnc.github.io/projects/collocated_vision_touch/index.html