 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRecognizing Abnormal Heart Sounds Using Deep Learning
Oct 19, 2017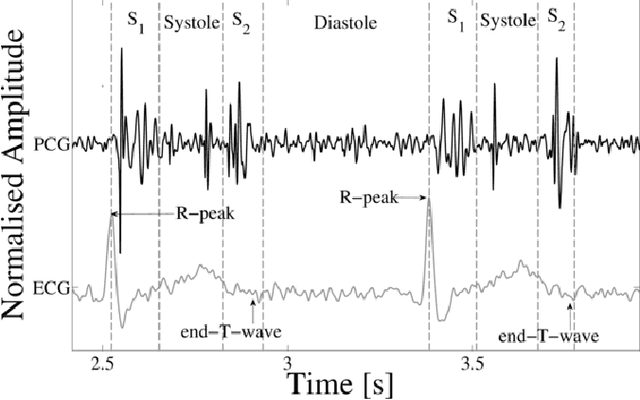
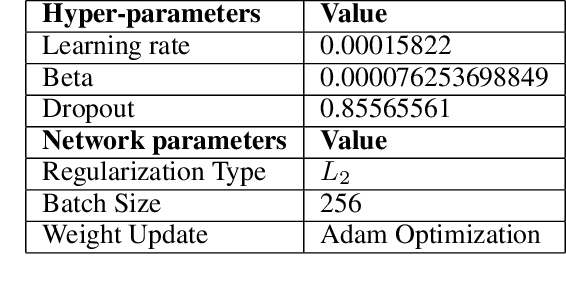

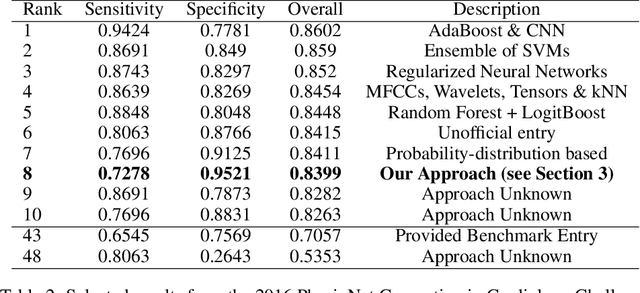
The work presented here applies deep learning to the task of automated cardiac auscultation, i.e. recognizing abnormalities in heart sounds. We describe an automated heart sound classification algorithm that combines the use of time-frequency heat map representations with a deep convolutional neural network (CNN). Given the cost-sensitive nature of misclassification, our CNN architecture is trained using a modified loss function that directly optimizes the trade-off between sensitivity and specificity. We evaluated our algorithm at the 2016 PhysioNet Computing in Cardiology challenge where the objective was to accurately classify normal and abnormal heart sounds from single, short, potentially noisy recordings. Our entry to the challenge achieved a final specificity of 0.95, sensitivity of 0.73 and overall score of 0.84. We achieved the greatest specificity score out of all challenge entries and, using just a single CNN, our algorithm differed in overall score by only 0.02 compared to the top place finisher, which used an ensemble approach.
Multi-Agent Deployment for Visibility Coverage in Polygonal Environments with Holes
Dec 02, 2010



This article presents a distributed algorithm for a group of robotic agents with omnidirectional vision to deploy into nonconvex polygonal environments with holes. Agents begin deployment from a common point, possess no prior knowledge of the environment, and operate only under line-of-sight sensing and communication. The objective of the deployment is for the agents to achieve full visibility coverage of the environment while maintaining line-of-sight connectivity with each other. This is achieved by incrementally partitioning the environment into distinct regions, each completely visible from some agent. Proofs are given of (i) convergence, (ii) upper bounds on the time and number of agents required, and (iii) bounds on the memory and communication complexity. Simulation results and description of robust extensions are also included.
Asynchronous Distributed Searchlight Scheduling
Aug 10, 2007



This paper develops and compares two simple asynchronous distributed searchlight scheduling algorithms for multiple robotic agents in nonconvex polygonal environments. A searchlight is a ray emitted by an agent which cannot penetrate the boundary of the environment. A point is detected by a searchlight if and only if the point is on the ray at some instant. Targets are points which can move continuously with unbounded speed. The objective of the proposed algorithms is for the agents to coordinate the slewing (rotation about a point) of their searchlights in a distributed manner, i.e., using only local sensing and limited communication, such that any target will necessarily be detected in finite time. The first algorithm we develop, called the DOWSS (Distributed One Way Sweep Strategy), is a distributed version of a known algorithm described originally in 1990 by Sugihara et al \cite{KS-IS-MY:90}, but it can be very slow in clearing the entire environment because only one searchlight may slew at a time. In an effort to reduce the time to clear the environment, we develop a second algorithm, called the PTSS (Parallel Tree Sweep Strategy), in which searchlights sweep in parallel if guards are placed according to an environment partition belonging to a class we call PTSS partitions. Finally, we discuss how DOWSS and PTSS could be combined with with deployment, or extended to environments with holes.
Multirobot rendezvous with visibility sensors in nonconvex environments
Nov 06, 2006



This paper presents a coordination algorithm for mobile autonomous robots. Relying upon distributed sensing the robots achieve rendezvous, that is, they move to a common location. Each robot is a point mass moving in a nonconvex environment according to an omnidirectional kinematic model. Each robot is equipped with line-of-sight limited-range sensors, i.e., a robot can measure the relative position of any object (robots or environment boundary) if and only if the object is within a given distance and there are no obstacles in-between. The algorithm is designed using the notions of robust visibility, connectivity-preserving constraint sets, and proximity graphs. Simulations illustrate the theoretical results on the correctness of the proposed algorithm, and its performance in asynchronous setups and with sensor measurement and control errors.