 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultiple Mean-Payoff Optimization under Local Stability Constraints
Dec 17, 2024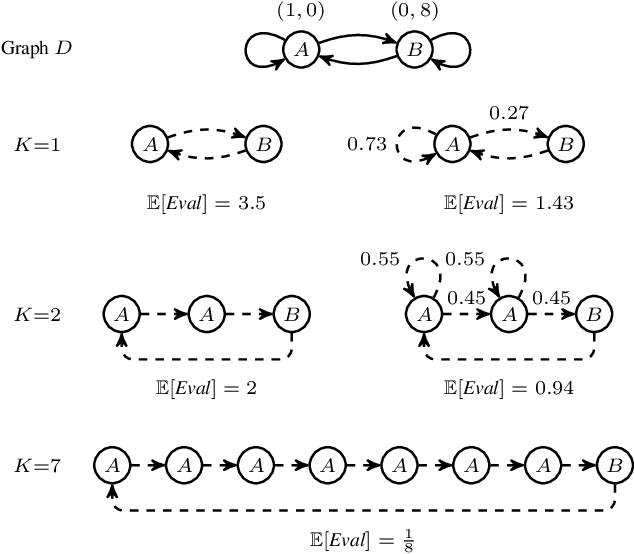
The long-run average payoff per transition (mean payoff) is the main tool for specifying the performance and dependability properties of discrete systems. The problem of constructing a controller (strategy) simultaneously optimizing several mean payoffs has been deeply studied for stochastic and game-theoretic models. One common issue of the constructed controllers is the instability of the mean payoffs, measured by the deviations of the average rewards per transition computed in a finite "window" sliding along a run. Unfortunately, the problem of simultaneously optimizing the mean payoffs under local stability constraints is computationally hard, and the existing works do not provide a practically usable algorithm even for non-stochastic models such as two-player games. In this paper, we design and evaluate the first efficient and scalable solution to this problem applicable to Markov decision processes.
General Optimization Framework for Recurrent Reachability Objectives
May 27, 2022

We consider the mobile robot path planning problem for a class of recurrent reachability objectives. These objectives are parameterized by the expected time needed to visit one position from another, the expected square of this time, and also the frequency of moves between two neighboring locations. We design an efficient strategy synthesis algorithm for recurrent reachability objectives and demonstrate its functionality on non-trivial instances.
Synthesizing Efficient Solutions for Patrolling Problems in the Internet Environment
May 10, 2018

We propose an algorithm for constructing efficient patrolling strategies in the Internet environment, where the protected targets are nodes connected to the network and the patrollers are software agents capable of detecting/preventing undesirable activities on the nodes. The algorithm is based on a novel compositional principle designed for a special class of strategies, and it can quickly construct (sub)optimal solutions even if the number of targets reaches hundreds of millions.
MultiGain: A controller synthesis tool for MDPs with multiple mean-payoff objectives
Jan 13, 2015


We present MultiGain, a tool to synthesize strategies for Markov decision processes (MDPs) with multiple mean-payoff objectives. Our models are described in PRISM, and our tool uses the existing interface and simulator of PRISM. Our tool extends PRISM by adding novel algorithms for multiple mean-payoff objectives, and also provides features such as (i)~generating strategies and exploring them for simulation, and checking them with respect to other properties; and (ii)~generating an approximate Pareto curve for two mean-payoff objectives. In addition, we present a new practical algorithm for the analysis of MDPs with multiple mean-payoff objectives under memoryless strategies.