Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneral Optimization Framework for Recurrent Reachability Objectives
Paper and Code
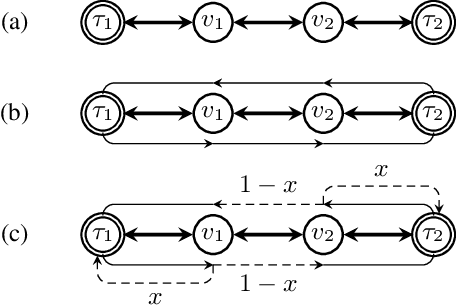

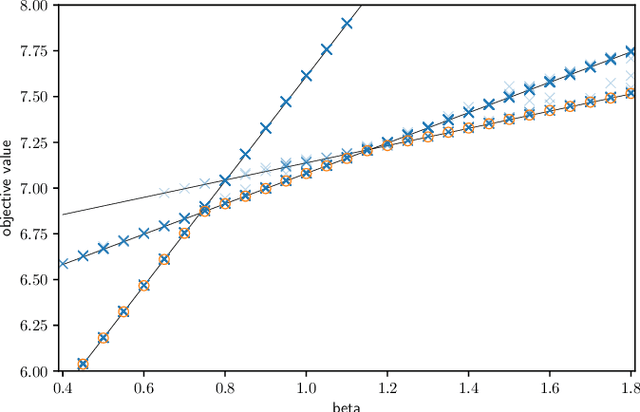
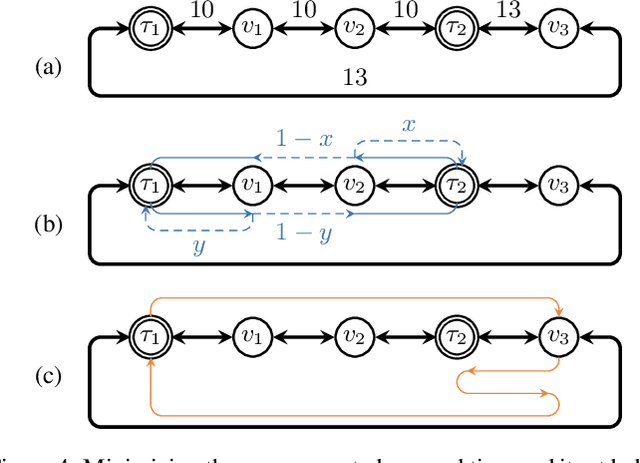
We consider the mobile robot path planning problem for a class of recurrent reachability objectives. These objectives are parameterized by the expected time needed to visit one position from another, the expected square of this time, and also the frequency of moves between two neighboring locations. We design an efficient strategy synthesis algorithm for recurrent reachability objectives and demonstrate its functionality on non-trivial instances.
View paper on