 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeICPR 2024 Competition on Safe Segmentation of Drive Scenes in Unstructured Traffic and Adverse Weather Conditions
Sep 09, 2024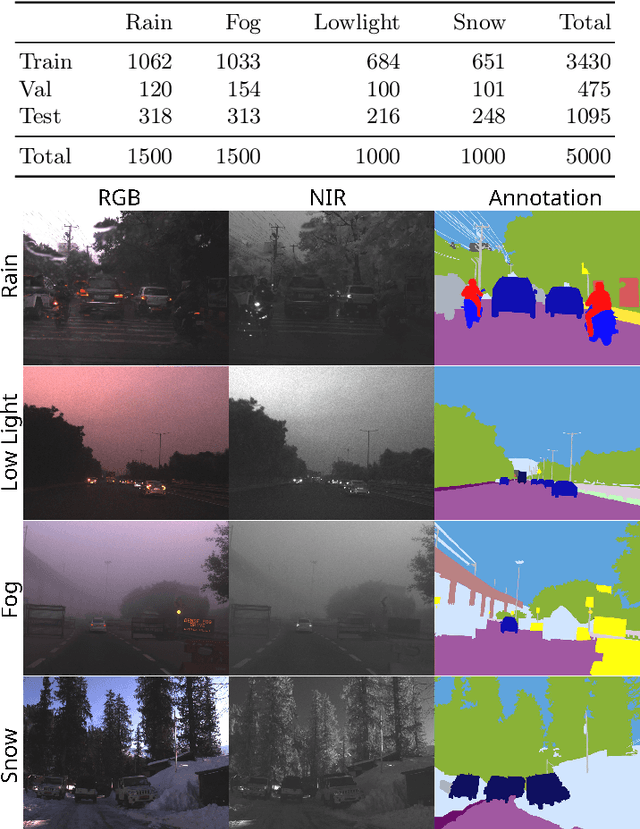
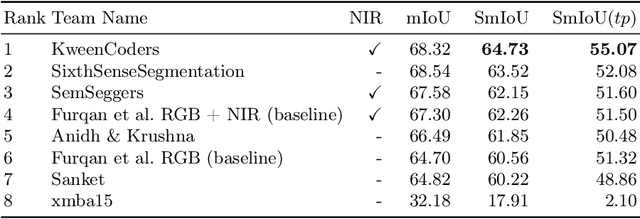
The ICPR 2024 Competition on Safe Segmentation of Drive Scenes in Unstructured Traffic and Adverse Weather Conditions served as a rigorous platform to evaluate and benchmark state-of-the-art semantic segmentation models under challenging conditions for autonomous driving. Over several months, participants were provided with the IDD-AW dataset, consisting of 5000 high-quality RGB-NIR image pairs, each annotated at the pixel level and captured under adverse weather conditions such as rain, fog, low light, and snow. A key aspect of the competition was the use and improvement of the Safe mean Intersection over Union (Safe mIoU) metric, designed to penalize unsafe incorrect predictions that could be overlooked by traditional mIoU. This innovative metric emphasized the importance of safety in developing autonomous driving systems. The competition showed significant advancements in the field, with participants demonstrating models that excelled in semantic segmentation and prioritized safety and robustness in unstructured and adverse conditions. The results of the competition set new benchmarks in the domain, highlighting the critical role of safety in deploying autonomous vehicles in real-world scenarios. The contributions from this competition are expected to drive further innovation in autonomous driving technology, addressing the critical challenges of operating in diverse and unpredictable environments.
The Earth ain't Flat: Monocular Reconstruction of Vehicles on Steep and Graded Roads from a Moving Camera
Mar 06, 2018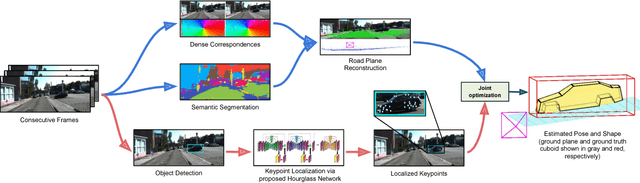
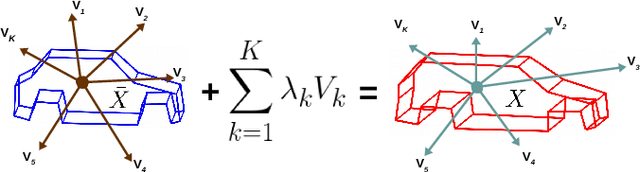

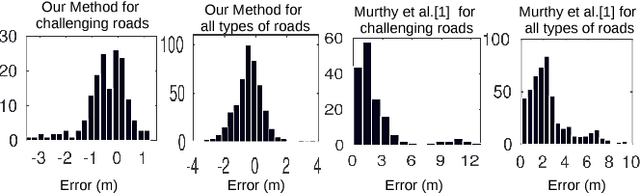
Accurate localization of other traffic participants is a vital task in autonomous driving systems. State-of-the-art systems employ a combination of sensing modalities such as RGB cameras and LiDARs for localizing traffic participants, but most such demonstrations have been confined to plain roads. We demonstrate, to the best of our knowledge, the first results for monocular object localization and shape estimation on surfaces that do not share the same plane with the moving monocular camera. We approximate road surfaces by local planar patches and use semantic cues from vehicles in the scene to initialize a local bundle-adjustment like procedure that simultaneously estimates the pose and shape of the vehicles, and the orientation of the local ground plane on which the vehicle stands as well. We evaluate the proposed approach on the KITTI and SYNTHIA-SF benchmarks, for a variety of road plane configurations. The proposed approach significantly improves the state-of-the-art for monocular object localization on arbitrarily-shaped roads.