 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Sweet Pepper Harvesting for Protected Cropping Systems
Jun 07, 2017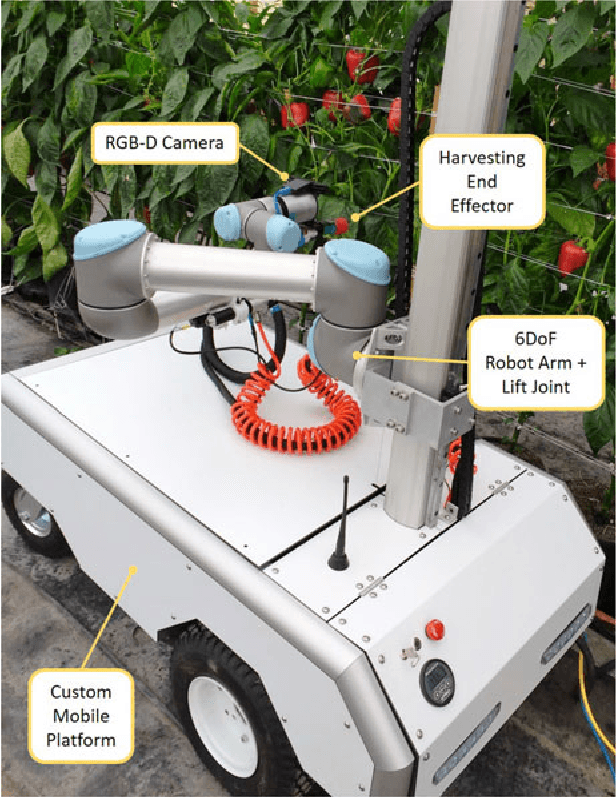
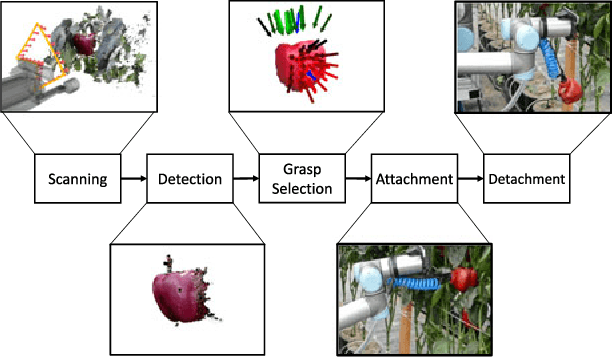
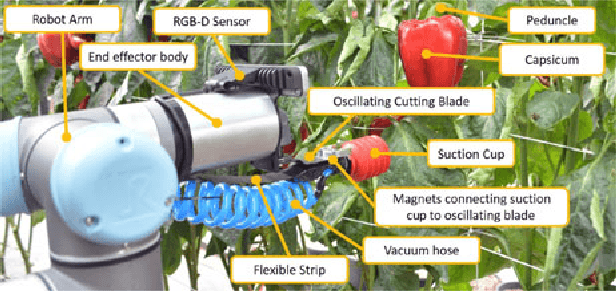
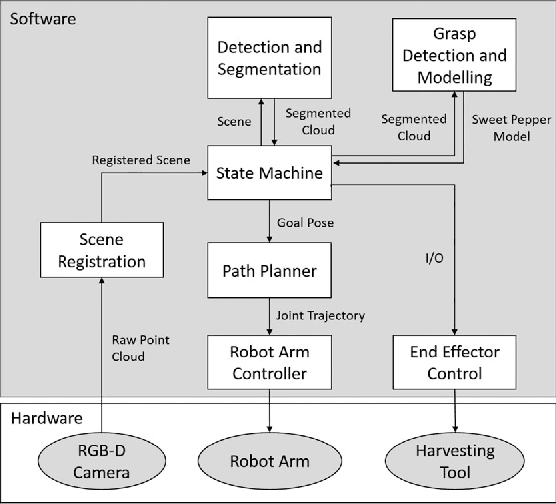
In this letter, we present a new robotic harvester (Harvey) that can autonomously harvest sweet pepper in protected cropping environments. Our approach combines effective vision algorithms with a novel end-effector design to enable successful harvesting of sweet peppers. Initial field trials in protected cropping environments, with two cultivar, demonstrate the efficacy of this approach achieving a 46% success rate for unmodified crop, and 58% for modified crop. Furthermore, for the more favourable cultivar we were also able to detach 90% of sweet peppers, indicating that improvements in the grasping success rate would result in greatly improved harvesting performance.
Peduncle Detection of Sweet Pepper for Autonomous Crop Harvesting - Combined Colour and 3D Information
Jan 30, 2017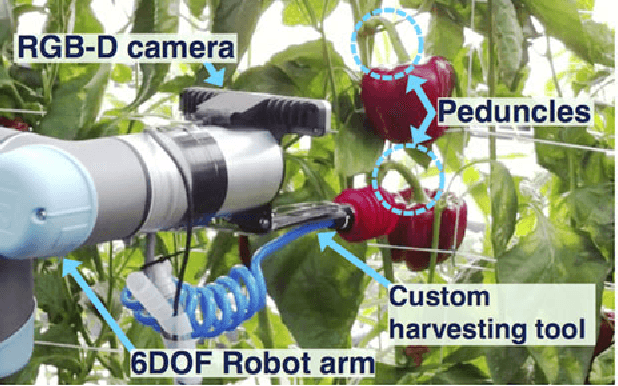
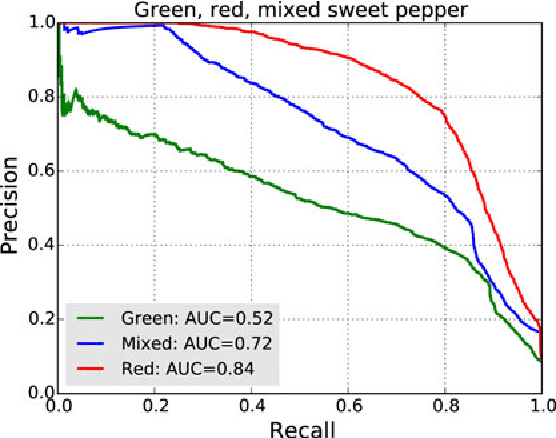
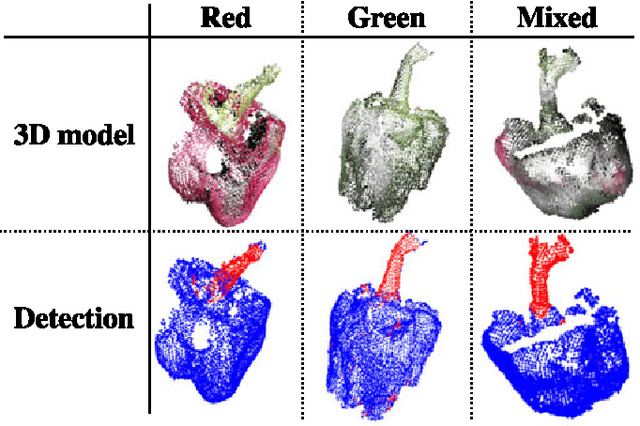
This paper presents a 3D visual detection method for the challenging task of detecting peduncles of sweet peppers (Capsicum annuum) in the field. Cutting the peduncle cleanly is one of the most difficult stages of the harvesting process, where the peduncle is the part of the crop that attaches it to the main stem of the plant. Accurate peduncle detection in 3D space is therefore a vital step in reliable autonomous harvesting of sweet peppers, as this can lead to precise cutting while avoiding damage to the surrounding plant. This paper makes use of both colour and geometry information acquired from an RGB-D sensor and utilises a supervised-learning approach for the peduncle detection task. The performance of the proposed method is demonstrated and evaluated using qualitative and quantitative results (the Area-Under-the-Curve (AUC) of the detection precision-recall curve). We are able to achieve an AUC of 0.71 for peduncle detection on field-grown sweet peppers. We release a set of manually annotated 3D sweet pepper and peduncle images to assist the research community in performing further research on this topic.