Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Sweet Pepper Harvesting for Protected Cropping Systems
Paper and Code
Jun 07, 2017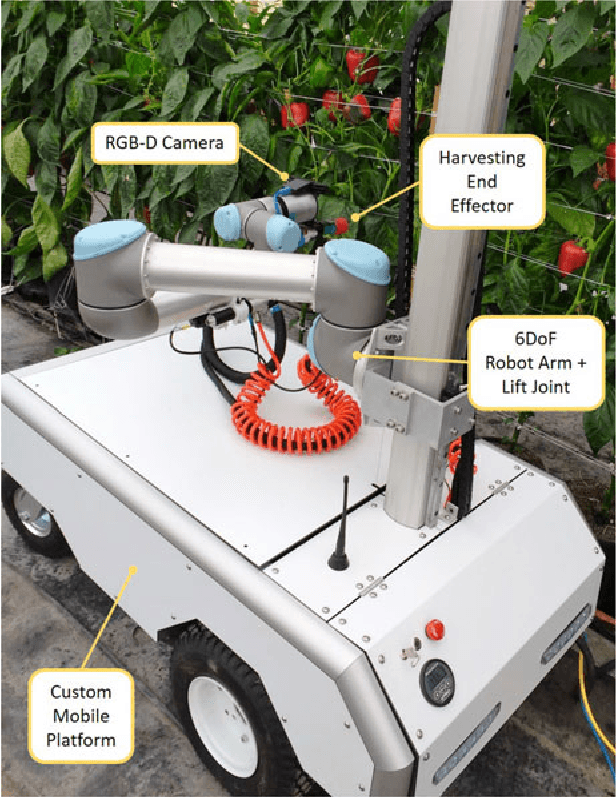
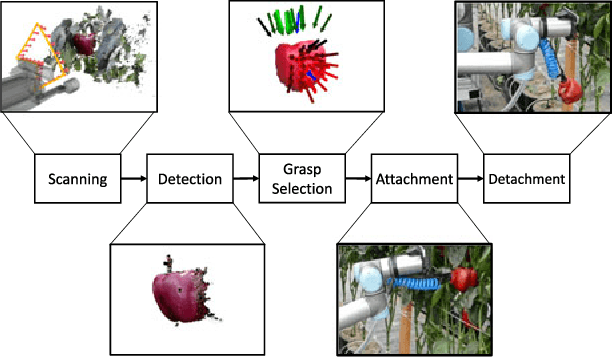
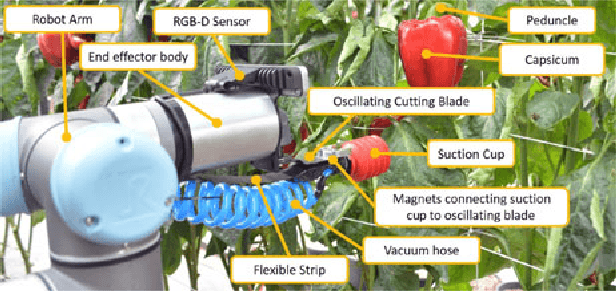
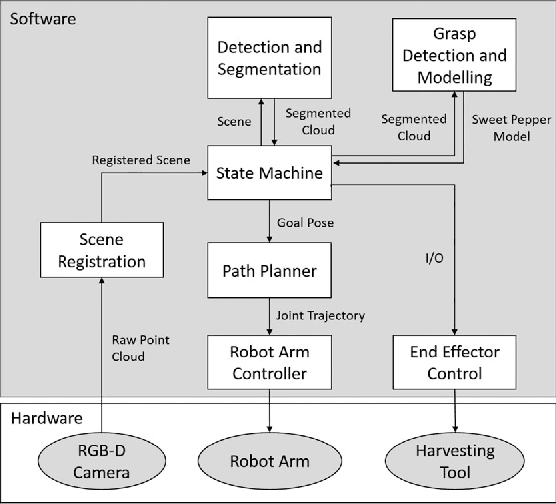
In this letter, we present a new robotic harvester (Harvey) that can autonomously harvest sweet pepper in protected cropping environments. Our approach combines effective vision algorithms with a novel end-effector design to enable successful harvesting of sweet peppers. Initial field trials in protected cropping environments, with two cultivar, demonstrate the efficacy of this approach achieving a 46% success rate for unmodified crop, and 58% for modified crop. Furthermore, for the more favourable cultivar we were also able to detach 90% of sweet peppers, indicating that improvements in the grasping success rate would result in greatly improved harvesting performance.
* IEEE Robotics and Automation Letters, vol. 2, no. 2, pp. 872-879,
April 2017. doi: 10.1109/LRA.2017.2655622
View paper on