 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBridging Industrial Expertise and XR with LLM-Powered Conversational Agents
Apr 07, 2025This paper introduces a novel integration of Retrieval-Augmented Generation (RAG) enhanced Large Language Models (LLMs) with Extended Reality (XR) technologies to address knowledge transfer challenges in industrial environments. The proposed system embeds domain-specific industrial knowledge into XR environments through a natural language interface, enabling hands-free, context-aware expert guidance for workers. We present the architecture of the proposed system consisting of an LLM Chat Engine with dynamic tool orchestration and an XR application featuring voice-driven interaction. Performance evaluation of various chunking strategies, embedding models, and vector databases reveals that semantic chunking, balanced embedding models, and efficient vector stores deliver optimal performance for industrial knowledge retrieval. The system's potential is demonstrated through early implementation in multiple industrial use cases, including robotic assembly, smart infrastructure maintenance, and aerospace component servicing. Results indicate potential for enhancing training efficiency, remote assistance capabilities, and operational guidance in alignment with Industry 5.0's human-centric and resilient approach to industrial development.
BuildingNet: Learning to Label 3D Buildings
Oct 11, 2021

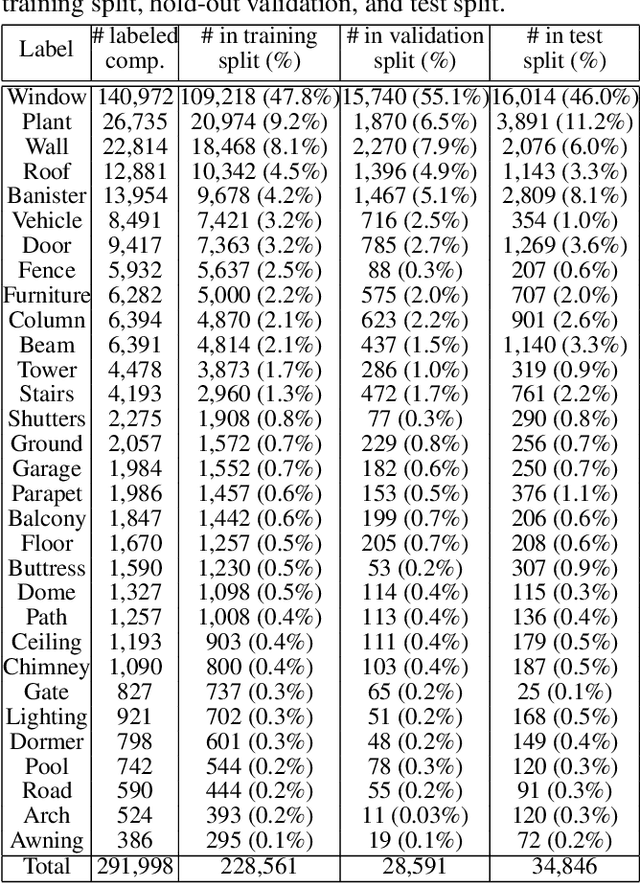
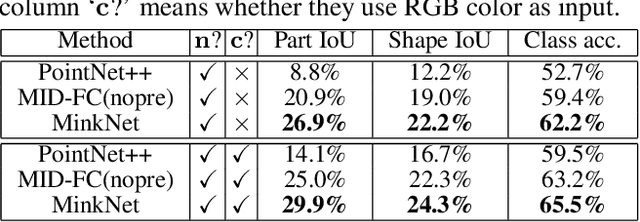
We introduce BuildingNet: (a) a large-scale dataset of 3D building models whose exteriors are consistently labeled, (b) a graph neural network that labels building meshes by analyzing spatial and structural relations of their geometric primitives. To create our dataset, we used crowdsourcing combined with expert guidance, resulting in 513K annotated mesh primitives, grouped into 292K semantic part components across 2K building models. The dataset covers several building categories, such as houses, churches, skyscrapers, town halls, libraries, and castles. We include a benchmark for evaluating mesh and point cloud labeling. Buildings have more challenging structural complexity compared to objects in existing benchmarks (e.g., ShapeNet, PartNet), thus, we hope that our dataset can nurture the development of algorithms that are able to cope with such large-scale geometric data for both vision and graphics tasks e.g., 3D semantic segmentation, part-based generative models, correspondences, texturing, and analysis of point cloud data acquired from real-world buildings. Finally, we show that our mesh-based graph neural network significantly improves performance over several baselines for labeling 3D meshes.