 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBridging Industrial Expertise and XR with LLM-Powered Conversational Agents
Apr 07, 2025This paper introduces a novel integration of Retrieval-Augmented Generation (RAG) enhanced Large Language Models (LLMs) with Extended Reality (XR) technologies to address knowledge transfer challenges in industrial environments. The proposed system embeds domain-specific industrial knowledge into XR environments through a natural language interface, enabling hands-free, context-aware expert guidance for workers. We present the architecture of the proposed system consisting of an LLM Chat Engine with dynamic tool orchestration and an XR application featuring voice-driven interaction. Performance evaluation of various chunking strategies, embedding models, and vector databases reveals that semantic chunking, balanced embedding models, and efficient vector stores deliver optimal performance for industrial knowledge retrieval. The system's potential is demonstrated through early implementation in multiple industrial use cases, including robotic assembly, smart infrastructure maintenance, and aerospace component servicing. Results indicate potential for enhancing training efficiency, remote assistance capabilities, and operational guidance in alignment with Industry 5.0's human-centric and resilient approach to industrial development.
Tackling problems of marker-based augmented reality under water
Oct 11, 2020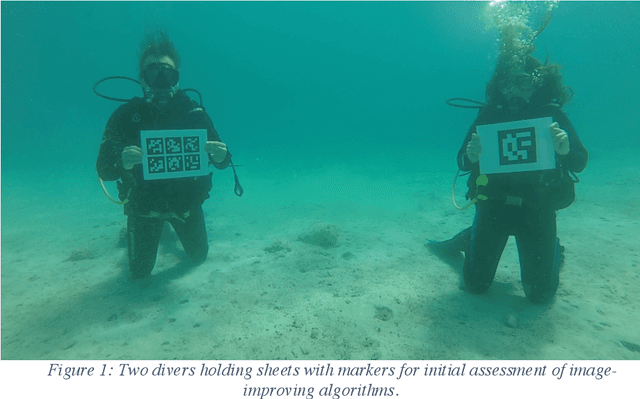



Underwater sites are a harsh environment for augmented reality applications. Obstacles that must be battled include poor visibility conditions, difficult navigation, and hard manipulation with devices under water. This chapter focuses on the problem of localizing a device under water using markers. It discusses various filters that enhance and improve images recorded under water, and their impact on marker-based tracking. It presents various combinations of 10 image improving algorithms and 4 marker detecting algorithms, and tests their performance in real situations. All solutions are designed to run real-time on mobile devices to provide a solid basis for augmented reality. Usability of this solution is evaluated on locations in Mediterranean Sea. It is shown that image improving algorithms with carefully chosen parameters can reduce the problems with visibility under water and improve the detection of markers. The best results are obtained with marker detecting algorithms that are specifically designed for underwater environments.