 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Algebraic Geometry Approach to Viewing Graph Solvability
Apr 04, 2025



The concept of viewing graph solvability has gained significant interest in the context of structure-from-motion. A viewing graph is a mathematical structure where nodes are associated to cameras and edges represent the epipolar geometry connecting overlapping views. Solvability studies under which conditions the cameras are uniquely determined by the graph. In this paper we propose a novel framework for analyzing solvability problems based on Algebraic Geometry, demonstrating its potential in understanding structure-from-motion graphs and proving a conjecture that was previously proposed.
Rotation Synchronization via Deep Matrix Factorization
May 09, 2023



In this paper we address the rotation synchronization problem, where the objective is to recover absolute rotations starting from pairwise ones, where the unknowns and the measures are represented as nodes and edges of a graph, respectively. This problem is an essential task for structure from motion and simultaneous localization and mapping. We focus on the formulation of synchronization via neural networks, which has only recently begun to be explored in the literature. Inspired by deep matrix completion, we express rotation synchronization in terms of matrix factorization with a deep neural network. Our formulation exhibits implicit regularization properties and, more importantly, is unsupervised, whereas previous deep approaches are supervised. Our experiments show that we achieve comparable accuracy to the closest competitors in most scenes, while working under weaker assumptions.
Motion Artifacts Detection in Short-scan Dental CBCT Reconstructions
Apr 20, 2023Cone Beam Computed Tomography (CBCT) is widely used in dentistry for diagnostics and treatment planning. CBCT Imaging has a long acquisition time and consequently, the patient is likely to move. This motion causes significant artifacts in the reconstructed data which may lead to misdiagnosis. Existing motion correction algorithms only address this issue partially, struggling with inconsistencies due to truncation, accuracy, and execution speed. On the other hand, a short-scan reconstruction using a subset of motion-free projections with appropriate weighting methods can have a sufficient clinical image quality for most diagnostic purposes. Therefore, a framework is used in this study to extract the motion-free part of the scanned projections with which a clean short-scan volume can be reconstructed without using correction algorithms. Motion artifacts are detected using deep learning with a slice-based prediction scheme followed by volume averaging to get the final result. A realistic motion simulation strategy and data augmentation has been implemented to address data scarcity. The framework has been validated by testing it with real motion-affected data while the model was trained only with simulated motion data. This shows the feasibility to apply the proposed framework to a broad variety of motion cases for further research.
Robust Rotation Synchronization via Low-rank and Sparse Matrix Decomposition
Jul 12, 2017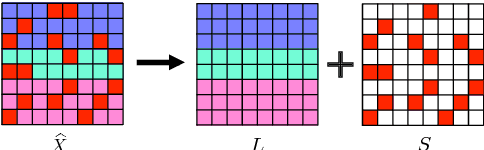
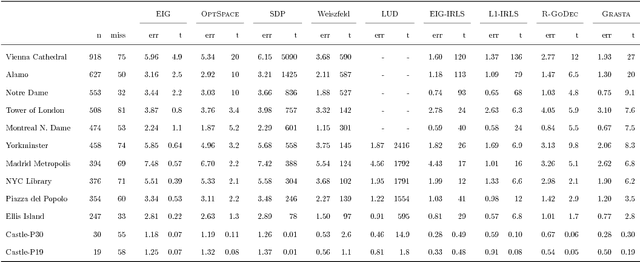

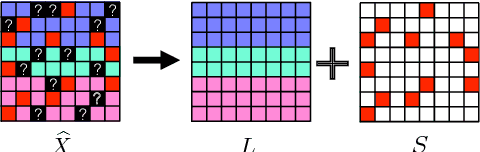
This paper deals with the rotation synchronization problem, which arises in global registration of 3D point-sets and in structure from motion. The problem is formulated in an unprecedented way as a "low-rank and sparse" matrix decomposition that handles both outliers and missing data. A minimization strategy, dubbed R-GoDec, is also proposed and evaluated experimentally against state-of-the-art algorithms on simulated and real data. The results show that R-GoDec is the fastest among the robust algorithms.
On Computing the Translations Norm in the Epipolar Graph
Sep 04, 2015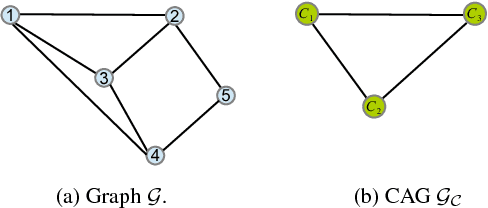



This paper deals with the problem of recovering the unknown norm of relative translations between cameras based on the knowledge of relative rotations and translation directions. We provide theoretical conditions for the solvability of such a problem, and we propose a two-stage method to solve it. First, a cycle basis for the epipolar graph is computed, then all the scaling factors are recovered simultaneously by solving a homogeneous linear system. We demonstrate the accuracy of our solution by means of synthetic and real experiments.
* Accepted at 3DV 2015
Spectral Motion Synchronization in SE(3)
Jun 29, 2015



This paper addresses the problem of motion synchronization (or averaging) and describes a simple, closed-form solution based on a spectral decomposition, which does not consider rotation and translation separately but works straight in SE(3), the manifold of rigid motions. Besides its theoretical interest, being the first closed form solution in SE(3), experimental results show that it compares favourably with the state of the art both in terms of precision and speed.
Hierarchical structure-and-motion recovery from uncalibrated images
Jun 01, 2015



This paper addresses the structure-and-motion problem, that requires to find camera motion and 3D struc- ture from point matches. A new pipeline, dubbed Samantha, is presented, that departs from the prevailing sequential paradigm and embraces instead a hierarchical approach. This method has several advantages, like a provably lower computational complexity, which is necessary to achieve true scalability, and better error containment, leading to more stability and less drift. Moreover, a practical autocalibration procedure allows to process images without ancillary information. Experiments with real data assess the accuracy and the computational efficiency of the method.
* Accepted for publication in CVIU