Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Rotation Synchronization via Low-rank and Sparse Matrix Decomposition
Paper and Code
Jul 12, 2017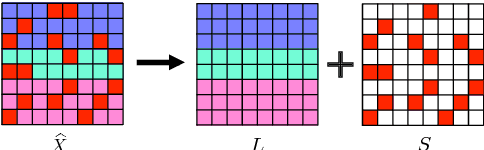
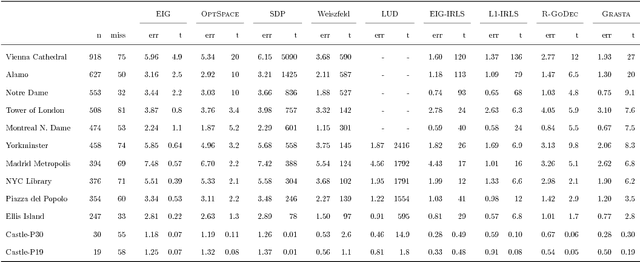

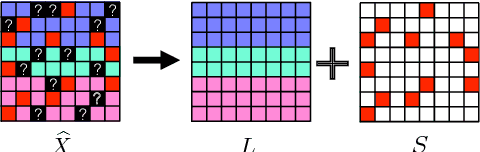
This paper deals with the rotation synchronization problem, which arises in global registration of 3D point-sets and in structure from motion. The problem is formulated in an unprecedented way as a "low-rank and sparse" matrix decomposition that handles both outliers and missing data. A minimization strategy, dubbed R-GoDec, is also proposed and evaluated experimentally against state-of-the-art algorithms on simulated and real data. The results show that R-GoDec is the fastest among the robust algorithms.
* The material contained in this paper is part of a manuscript
submitted to CVIU
View paper on