 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Social Cost Functions for Human-Aware Path Planning
Jul 15, 2024



Achieving social acceptance is one of the main goals of Social Robotic Navigation. Despite this topic has received increasing interest in recent years, most of the research has focused on driving the robotic agent along obstacle-free trajectories, planning around estimates of future human motion to respect personal distances and optimize navigation. However, social interactions in everyday life are also dictated by norms that do not strictly depend on movement, such as when standing at the end of a queue rather than cutting it. In this paper, we propose a novel method to recognize common social scenarios and modify a traditional planner's cost function to adapt to them. This solution enables the robot to carry out different social navigation behaviors that would not arise otherwise, maintaining the robustness of traditional navigation. Our approach allows the robot to learn different social norms with a single learned model, rather than having different modules for each task. As a proof of concept, we consider the tasks of queuing and respect interaction spaces of groups of people talking to one another, but the method can be extended to other human activities that do not involve motion.
Enhancing Navigation Benchmarking and Perception Data Generation for Row-based Crops in Simulation
Jun 27, 2023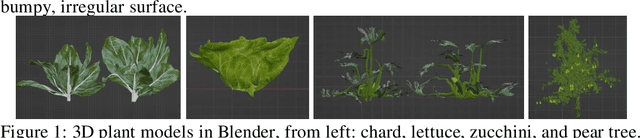
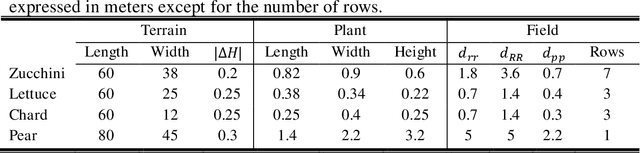
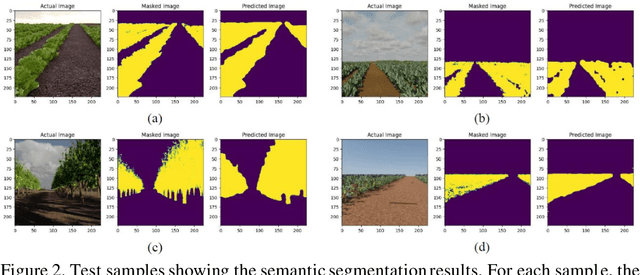

Service robotics is recently enhancing precision agriculture enabling many automated processes based on efficient autonomous navigation solutions. However, data generation and infield validation campaigns hinder the progress of large-scale autonomous platforms. Simulated environments and deep visual perception are spreading as successful tools to speed up the development of robust navigation with low-cost RGB-D cameras. In this context, the contribution of this work is twofold: a synthetic dataset to train deep semantic segmentation networks together with a collection of virtual scenarios for a fast evaluation of navigation algorithms. Moreover, an automatic parametric approach is developed to explore different field geometries and features. The simulation framework and the dataset have been evaluated by training a deep segmentation network on different crops and benchmarking the resulting navigation.
PIC4rl-gym: a ROS2 modular framework for Robots Autonomous Navigation with Deep Reinforcement Learning
Nov 19, 2022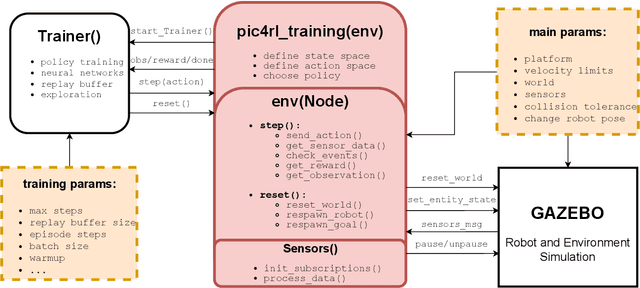


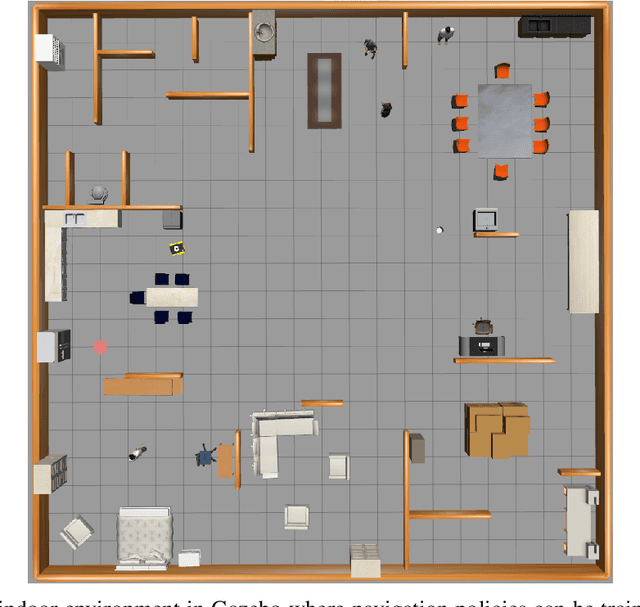
Learning agents can optimize standard autonomous navigation improving flexibility, efficiency, and computational cost of the system by adopting a wide variety of approaches. This work introduces the \textit{PIC4rl-gym}, a fundamental modular framework to enhance navigation and learning research by mixing ROS2 and Gazebo, the standard tools of the robotics community, with Deep Reinforcement Learning (DRL). The paper describes the whole structure of the PIC4rl-gym, which fully integrates DRL agent's training and testing in several indoor and outdoor navigation scenarios and tasks. A modular approach is adopted to easily customize the simulation by selecting new platforms, sensors, or models. We demonstrate the potential of our novel gym by benchmarking the resulting policies, trained for different navigation tasks, with a complete set of metrics.
RL-DWA Omnidirectional Motion Planning for Person Following in Domestic Assistance and Monitoring
Nov 09, 2022


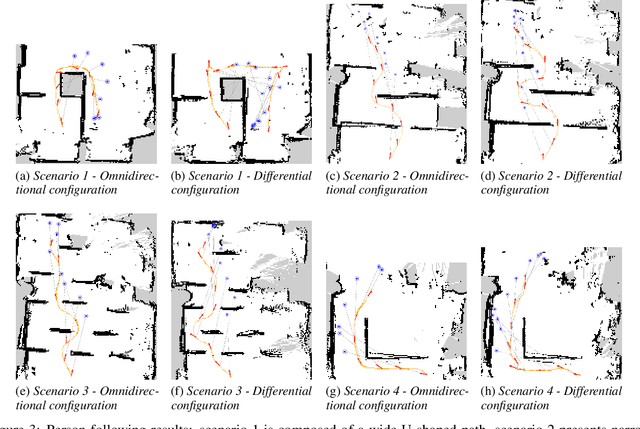
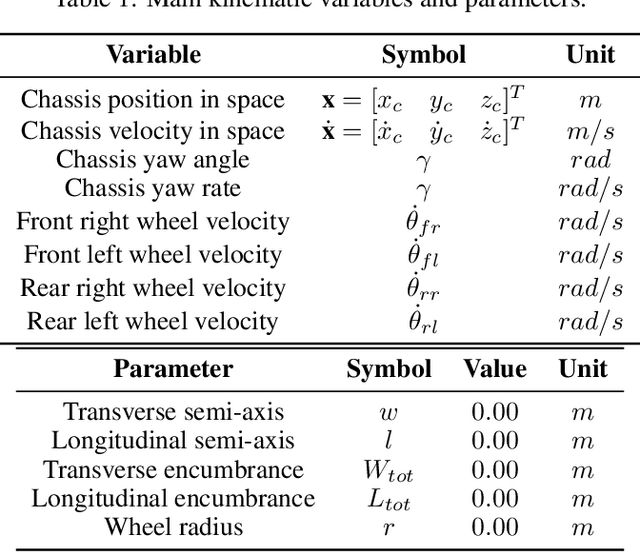
Robot assistants are emerging as high-tech solutions to support people in everyday life. Following and assisting the user in the domestic environment requires flexible mobility to safely move in cluttered spaces. We introduce a new approach to person following for assistance and monitoring. Our methodology exploits an omnidirectional robotic platform to detach the computation of linear and angular velocities and navigate within the domestic environment without losing track of the assisted person. While linear velocities are managed by a conventional Dynamic Window Approach (DWA) local planner, we trained a Deep Reinforcement Learning (DRL) agent to predict optimized angular velocities commands and maintain the orientation of the robot towards the user. We evaluate our navigation system on a real omnidirectional platform in various indoor scenarios, demonstrating the competitive advantage of our solution compared to a standard differential steering following.
Marvin: Innovative Omni-Directional Robotic Assistant for Domestic Environments
Dec 10, 2021


Technology is progressively reshaping the domestic environment as we know it, enhancing home security and the overall ambient quality through smart connected devices. However, demographic shift and pandemics recently demonstrate to cause isolation of elderly people in their houses, generating the need for a reliable assistive figure. Robotic assistants are the new frontier of innovation for domestic welfare. Elderly monitoring is only one of the possible service applications an intelligent robotic platform can handle for collective wellbeing. In this paper, we present Marvin, a novel assistive robot we developed with a modular layer-based architecture, merging a flexible mechanical design with state-of-the-art Artificial Intelligence for perception and vocal control. With respect to previous works on robotic assistants, we propose an omnidirectional platform provided with four mecanum wheels, which enable autonomous navigation in conjunction with efficient obstacle avoidance in cluttered environments. Moreover, we design a controllable positioning device to extend the visual range of sensors and to improve the access to the user interface for telepresence and connectivity. Lightweight deep learning solutions for visual perception, person pose classification and vocal command completely run on the embedded hardware of the robot, avoiding privacy issues arising from private data collection on cloud services.