 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNon-linear Model Predictive Control for Multi-task GPS-free Autonomous Navigation in Vineyards
Apr 08, 2024



Autonomous navigation is the foundation of agricultural robots. This paper focuses on developing an advanced autonomous navigation system for a rover operating within row-based crops. A position-agnostic system is proposed to address the challenging situation when standard localization methods, like GPS, fail due to unfavorable weather or obstructed signals. This breakthrough is especially vital in densely vegetated regions, including areas covered by thick tree canopies or pergola vineyards. This work proposed a novel system that leverages a single RGB-D camera and a Non-linear Model Predictive Control strategy to navigate through entire rows, adapting to various crop spacing. The presented solution demonstrates versatility in handling diverse crop densities, environmental factors, and multiple navigation tasks to support agricultural activities at an extremely cost-effective implementation. Experimental validation in simulated and real vineyards underscores the system's robustness and competitiveness in both standard row traversal and target objects approach.
GPS-free Autonomous Navigation in Cluttered Tree Rows with Deep Semantic Segmentation
Apr 08, 2024



Segmentation-based autonomous navigation has recently been presented as an appealing approach to guiding robotic platforms through crop rows without requiring perfect GPS localization. Nevertheless, current techniques are restricted to situations where the distinct separation between the plants and the sky allows for the identification of the row's center. However, tall, dense vegetation, such as high tree rows and orchards, is the primary cause of GPS signal blockage. In this study, we increase the overall robustness and adaptability of the control algorithm by extending the segmentation-based robotic guiding to those cases where canopies and branches occlude the sky and prevent the utilization of GPS and earlier approaches. An efficient Deep Neural Network architecture has been used to address semantic segmentation, performing the training with synthetic data only. Numerous vineyards and tree fields have undergone extensive testing in both simulation and real-world to show the solution's competitive benefits.
Lavender Autonomous Navigation with Semantic Segmentation at the Edge
Sep 13, 2023Achieving success in agricultural activities heavily relies on precise navigation in row crop fields. Recently, segmentation-based navigation has emerged as a reliable technique when GPS-based localization is unavailable or higher accuracy is needed due to vegetation or unfavorable weather conditions. It also comes in handy when plants are growing rapidly and require an online adaptation of the navigation algorithm. This work applies a segmentation-based visual agnostic navigation algorithm to lavender fields, considering both simulation and real-world scenarios. The effectiveness of this approach is validated through a wide set of experimental tests, which show the capability of the proposed solution to generalize over different scenarios and provide highly-reliable results.
Enhancing Navigation Benchmarking and Perception Data Generation for Row-based Crops in Simulation
Jun 27, 2023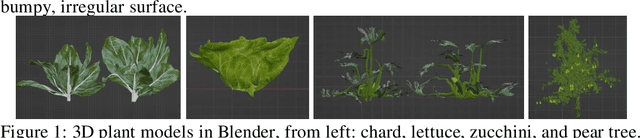
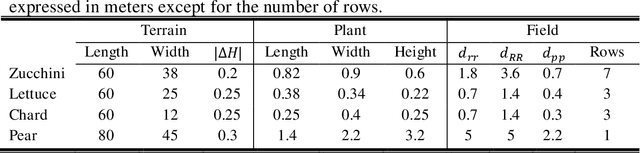
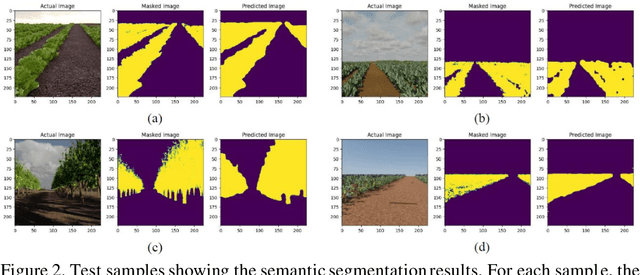

Service robotics is recently enhancing precision agriculture enabling many automated processes based on efficient autonomous navigation solutions. However, data generation and infield validation campaigns hinder the progress of large-scale autonomous platforms. Simulated environments and deep visual perception are spreading as successful tools to speed up the development of robust navigation with low-cost RGB-D cameras. In this context, the contribution of this work is twofold: a synthetic dataset to train deep semantic segmentation networks together with a collection of virtual scenarios for a fast evaluation of navigation algorithms. Moreover, an automatic parametric approach is developed to explore different field geometries and features. The simulation framework and the dataset have been evaluated by training a deep segmentation network on different crops and benchmarking the resulting navigation.