 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePIC4rl-gym: a ROS2 modular framework for Robots Autonomous Navigation with Deep Reinforcement Learning
Paper and Code
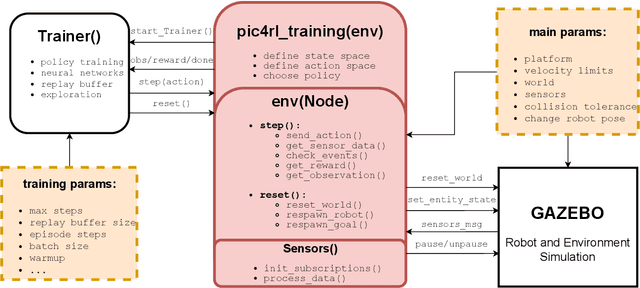


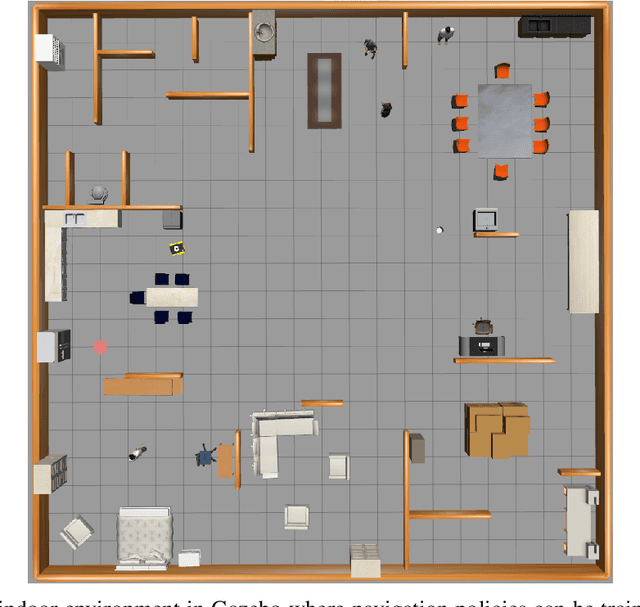
Learning agents can optimize standard autonomous navigation improving flexibility, efficiency, and computational cost of the system by adopting a wide variety of approaches. This work introduces the \textit{PIC4rl-gym}, a fundamental modular framework to enhance navigation and learning research by mixing ROS2 and Gazebo, the standard tools of the robotics community, with Deep Reinforcement Learning (DRL). The paper describes the whole structure of the PIC4rl-gym, which fully integrates DRL agent's training and testing in several indoor and outdoor navigation scenarios and tasks. A modular approach is adopted to easily customize the simulation by selecting new platforms, sensors, or models. We demonstrate the potential of our novel gym by benchmarking the resulting policies, trained for different navigation tasks, with a complete set of metrics.