 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRL-DWA Omnidirectional Motion Planning for Person Following in Domestic Assistance and Monitoring
Paper and Code



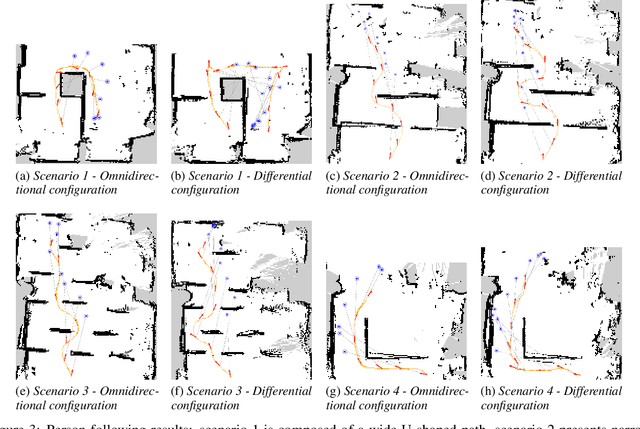
Robot assistants are emerging as high-tech solutions to support people in everyday life. Following and assisting the user in the domestic environment requires flexible mobility to safely move in cluttered spaces. We introduce a new approach to person following for assistance and monitoring. Our methodology exploits an omnidirectional robotic platform to detach the computation of linear and angular velocities and navigate within the domestic environment without losing track of the assisted person. While linear velocities are managed by a conventional Dynamic Window Approach (DWA) local planner, we trained a Deep Reinforcement Learning (DRL) agent to predict optimized angular velocities commands and maintain the orientation of the robot towards the user. We evaluate our navigation system on a real omnidirectional platform in various indoor scenarios, demonstrating the competitive advantage of our solution compared to a standard differential steering following.