 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShallow Water Bathymetry Survey using an Autonomous Surface Vehicle
Jul 18, 2022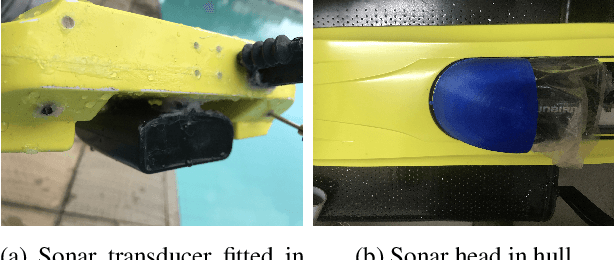
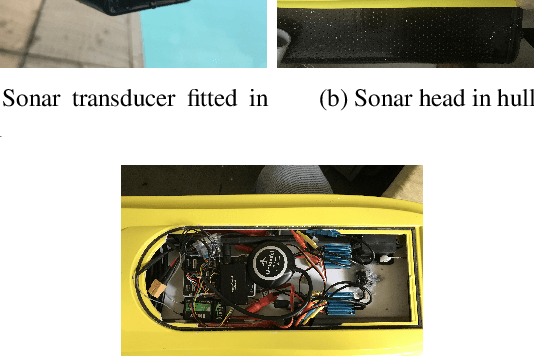
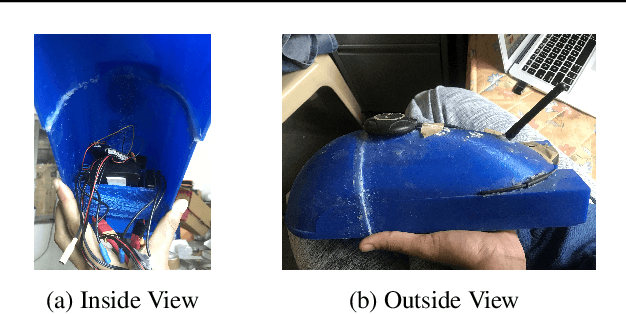
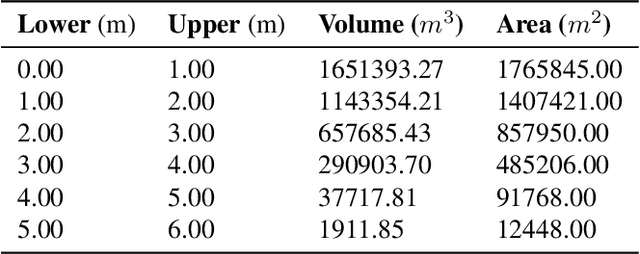
Accurate and cost effective mapping of water bodies has an enormous significance for environmental understanding and navigation. However, the quantity and quality of information we acquire from such environmental features is limited by various factors, including cost, time, security, and the capabilities of existing data collection techniques. Measurement of water depth is an important part of such mapping, particularly in shallow locations that could provide navigational risk or have important ecological functions. Erosion and deposition at these locations, for example, due to storms and erosion, can cause rapid changes that require repeated measurements. In this paper, we describe a low-cost, resilient, unmanned autonomous surface vehicle for bathymetry data collection using side-scan sonar. We discuss the adaptation of equipment and sensors for the collection of navigation, control, and bathymetry data and also give an overview of the vehicle setup. This autonomous surface vehicle has been used to collect bathymetry from the Powai Lake in Mumbai, India.
Deriving Surface Resistivity from Polarimetric SAR Data Using Dual-Input UNet
Jul 05, 2022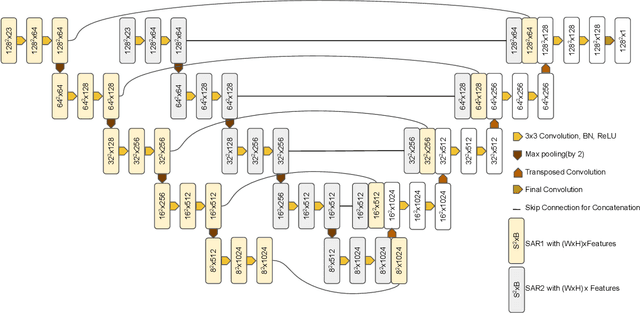
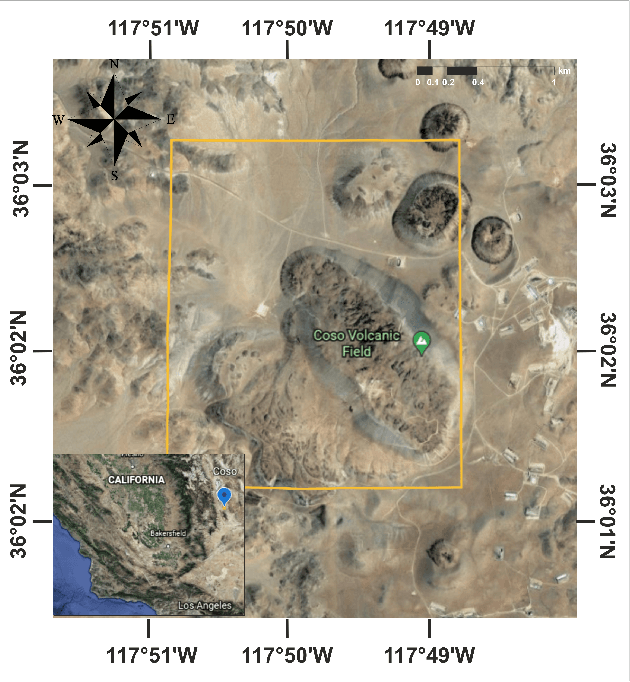
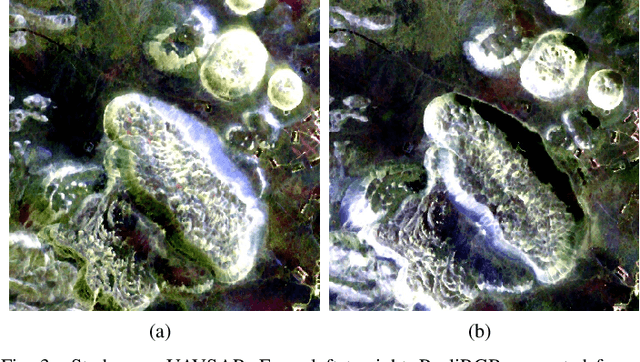

Traditional survey methods for finding surface resistivity are time-consuming and labor intensive. Very few studies have focused on finding the resistivity/conductivity using remote sensing data and deep learning techniques. In this line of work, we assessed the correlation between surface resistivity and Synthetic Aperture Radar (SAR) by applying various deep learning methods and tested our hypothesis in the Coso Geothermal Area, USA. For detecting the resistivity, L-band full polarimetric SAR data acquired by UAVSAR were used, and MT (Magnetotellurics) inverted resistivity data of the area were used as the ground truth. We conducted experiments to compare various deep learning architectures and suggest the use of Dual Input UNet (DI-UNet) architecture. DI-UNet uses a deep learning architecture to predict the resistivity using full polarimetric SAR data by promising a quick survey addition to the traditional method. Our proposed approach accomplished improved outcomes for the mapping of MT resistivity from SAR data.
Learning compositionally through attentive guidance
Sep 10, 2018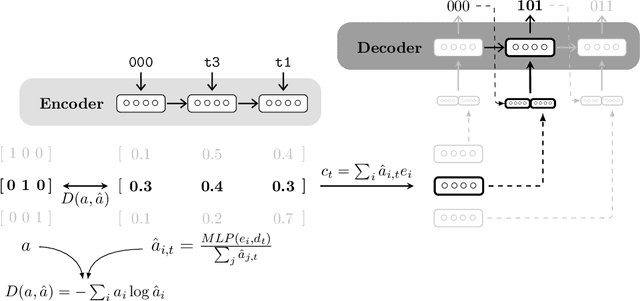
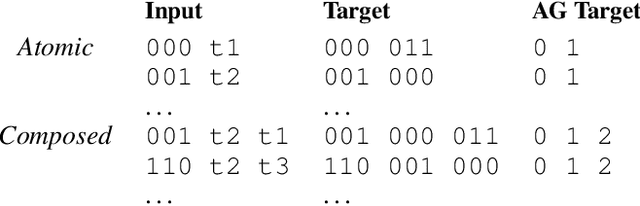
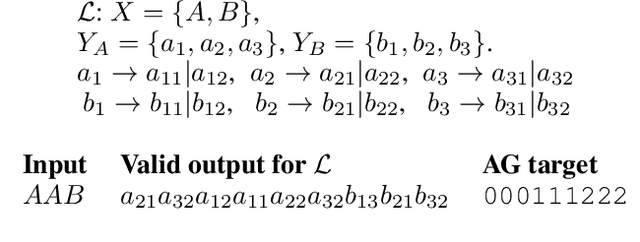
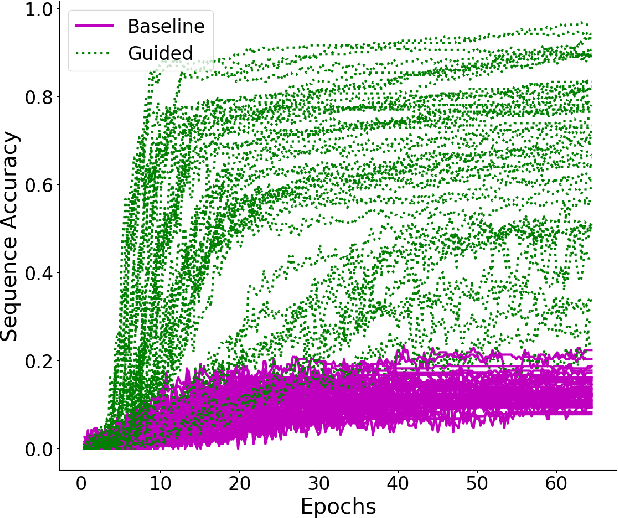
While neural network models have been successfully applied to domains that require substantial generalisation skills, recent studies have implied that they struggle when solving the task they are trained on requires inferring its underlying compositional structure. In this paper, we introduce Attentive Guidance, a mechanism to direct a sequence to sequence model equipped with attention to find more compositional solutions. We test it on two tasks, devised precisely to assess the compositional capabilities of neural models, and we show that vanilla sequence to sequence models with attention overfit the training distribution, while the guided versions come up with compositional solutions that fit the training and testing distributions almost equally well. Moreover, the learned solutions generalise even in cases where the training and testing distributions strongly diverge. In this way, we demonstrate that sequence to sequence models are capable of finding compositional solutions without requiring extra components. These results helps to disentangle the causes for the lack of systematic compositionality in neural networks, which can in turn fuel future work.