 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDark3R: Learning Structure from Motion in the Dark
Mar 05, 2026We introduce Dark3R, a framework for structure from motion in the dark that operates directly on raw images with signal-to-noise ratios (SNRs) below $-4$ dB -- a regime where conventional feature- and learning-based methods break down. Our key insight is to adapt large-scale 3D foundation models to extreme low-light conditions through a teacher--student distillation process, enabling robust feature matching and camera pose estimation in low light. Dark3R requires no 3D supervision; it is trained solely on noisy--clean raw image pairs, which can be either captured directly or synthesized using a simple Poisson--Gaussian noise model applied to well-exposed raw images. To train and evaluate our approach, we introduce a new, exposure-bracketed dataset that includes $\sim$42,000 multi-view raw images with ground-truth 3D annotations, and we demonstrate that Dark3R achieves state-of-the-art structure from motion in the low-SNR regime. Further, we demonstrate state-of-the-art novel view synthesis in the dark using Dark3R's predicted poses and a coarse-to-fine radiance field optimization procedure.
Neural Inverse Rendering from Propagating Light
Jun 05, 2025We present the first system for physically based, neural inverse rendering from multi-viewpoint videos of propagating light. Our approach relies on a time-resolved extension of neural radiance caching -- a technique that accelerates inverse rendering by storing infinite-bounce radiance arriving at any point from any direction. The resulting model accurately accounts for direct and indirect light transport effects and, when applied to captured measurements from a flash lidar system, enables state-of-the-art 3D reconstruction in the presence of strong indirect light. Further, we demonstrate view synthesis of propagating light, automatic decomposition of captured measurements into direct and indirect components, as well as novel capabilities such as multi-view time-resolved relighting of captured scenes.
Transientangelo: Few-Viewpoint Surface Reconstruction Using Single-Photon Lidar
Aug 23, 2024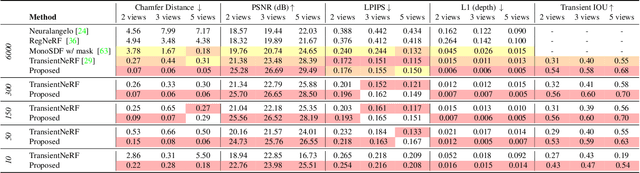
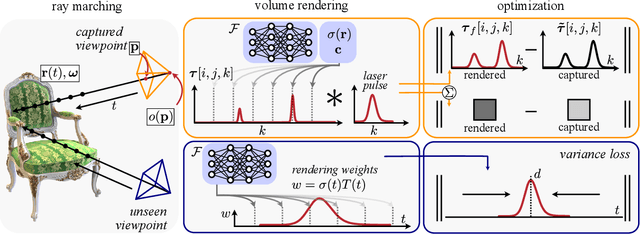
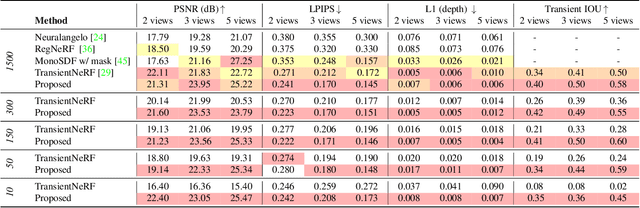
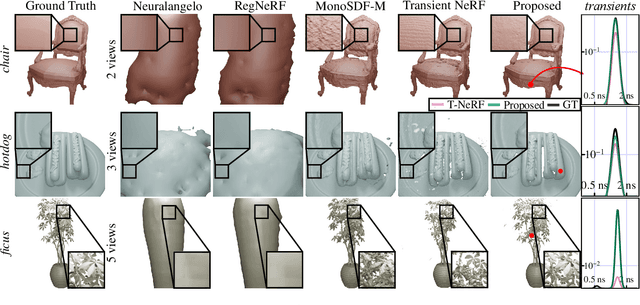
We consider the problem of few-viewpoint 3D surface reconstruction using raw measurements from a lidar system. Lidar captures 3D scene geometry by emitting pulses of light to a target and recording the speed-of-light time delay of the reflected light. However, conventional lidar systems do not output the raw, captured waveforms of backscattered light; instead, they pre-process these data into a 3D point cloud. Since this procedure typically does not accurately model the noise statistics of the system, exploit spatial priors, or incorporate information about downstream tasks, it ultimately discards useful information that is encoded in raw measurements of backscattered light. Here, we propose to leverage raw measurements captured with a single-photon lidar system from multiple viewpoints to optimize a neural surface representation of a scene. The measurements consist of time-resolved photon count histograms, or transients, which capture information about backscattered light at picosecond time scales. Additionally, we develop new regularization strategies that improve robustness to photon noise, enabling accurate surface reconstruction with as few as 10 photons per pixel. Our method outperforms other techniques for few-viewpoint 3D reconstruction based on depth maps, point clouds, or conventional lidar as demonstrated in simulation and with captured data.
Flying with Photons: Rendering Novel Views of Propagating Light
Apr 10, 2024



We present an imaging and neural rendering technique that seeks to synthesize videos of light propagating through a scene from novel, moving camera viewpoints. Our approach relies on a new ultrafast imaging setup to capture a first-of-its kind, multi-viewpoint video dataset with picosecond-level temporal resolution. Combined with this dataset, we introduce an efficient neural volume rendering framework based on the transient field. This field is defined as a mapping from a 3D point and 2D direction to a high-dimensional, discrete-time signal that represents time-varying radiance at ultrafast timescales. Rendering with transient fields naturally accounts for effects due to the finite speed of light, including viewpoint-dependent appearance changes caused by light propagation delays to the camera. We render a range of complex effects, including scattering, specular reflection, refraction, and diffraction. Additionally, we demonstrate removing viewpoint-dependent propagation delays using a time warping procedure, rendering of relativistic effects, and video synthesis of direct and global components of light transport.
Transient Neural Radiance Fields for Lidar View Synthesis and 3D Reconstruction
Jul 14, 2023Neural radiance fields (NeRFs) have become a ubiquitous tool for modeling scene appearance and geometry from multiview imagery. Recent work has also begun to explore how to use additional supervision from lidar or depth sensor measurements in the NeRF framework. However, previous lidar-supervised NeRFs focus on rendering conventional camera imagery and use lidar-derived point cloud data as auxiliary supervision; thus, they fail to incorporate the underlying image formation model of the lidar. Here, we propose a novel method for rendering transient NeRFs that take as input the raw, time-resolved photon count histograms measured by a single-photon lidar system, and we seek to render such histograms from novel views. Different from conventional NeRFs, the approach relies on a time-resolved version of the volume rendering equation to render the lidar measurements and capture transient light transport phenomena at picosecond timescales. We evaluate our method on a first-of-its-kind dataset of simulated and captured transient multiview scans from a prototype single-photon lidar. Overall, our work brings NeRFs to a new dimension of imaging at transient timescales, newly enabling rendering of transient imagery from novel views. Additionally, we show that our approach recovers improved geometry and conventional appearance compared to point cloud-based supervision when training on few input viewpoints. Transient NeRFs may be especially useful for applications which seek to simulate raw lidar measurements for downstream tasks in autonomous driving, robotics, and remote sensing.