 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Surrogate LPV State-Space Models with Uncertainty Quantification
Mar 31, 2026The Linear Parameter-Varying (LPV) framework enables the construction of surrogate models of complex nonlinear and high-dimensional systems, facilitating efficient stability and performance analysis together with controller design. Despite significant advances in data-driven LPV modelling, existing approaches do not quantify the uncertainty of the obtained LPV models. Consequently, assessing model reliability for analysis and control or detecting operation outside the training regime requires extensive validation and user expertise. This paper proposes a Bayesian approach for the joint estimation of LPV state-space models together with their scheduling, providing a characterization of model uncertainty and confidence bounds on the predicted model response directly from input-output data. Both aleatoric uncertainty due to measurement noise and epistemic uncertainty arising from limited training data and structural bias are considered. The resulting model preserves the LPV structure required for controller synthesis while enabling computationally efficient simulation and uncertainty propagation. The approach is demonstrated on the surrogate modelling of a two-dimensional nonlinear interconnection of mass-spring-damper systems.
RHYME-XT: A Neural Operator for Spatiotemporal Control Systems
Mar 18, 2026We propose RHYME-XT, an operator-learning framework for surrogate modeling of spatiotemporal control systems governed by input-affine nonlinear partial integro-differential equations (PIDEs) with localized rhythmic behavior. RHYME-XT uses a Galerkin projection to approximate the infinite-dimensional PIDE on a learned finite-dimensional subspace with spatial basis functions parameterized by a neural network. This yields a projected system of ODEs driven by projected inputs. Instead of integrating this non-autonomous system, we directly learn its flow map using an architecture for learning flow functions, avoiding costly computations while obtaining a continuous-time and discretization-invariant representation. Experiments on a neural field PIDE show that RHYME-XT outperforms a state-of-the-art neural operator and is able to transfer knowledge effectively across models trained on different datasets, through a fine-tuning process.
Fault Localisation in Infinite-Dimensional Linear Electrical Networks
Apr 07, 2025



We present a novel fault localisation methodology for linear time-invariant electrical networks with infinite-dimensional edge dynamics and uncertain fault dynamics. The theory accommodates instability and also bounded propagation delays in the network. The goal is to estimate the location of a fault along a given network edge, using sensors positioned arbitrarily throughout the network. Passive faults of unknown impedance are considered, along with stable faults of known impedance. To illustrate the approach, we tackle a significant use-case: a multi-conductor transmission line, with dynamics modelled by the Telegrapher's equation, subject to a line-to-ground fault. Frequency-domain insights are used to reformulate the general fault localisation problem into a non-convex scalar optimisation problem, of which the true fault location is guaranteed to be a global minimiser. Numerical experiments are run to quantify localisation performance over a range of fault resistances.
ON-Traffic: An Operator Learning Framework for Online Traffic Flow Estimation and Uncertainty Quantification from Lagrangian Sensors
Mar 18, 2025Accurate traffic flow estimation and prediction are critical for the efficient management of transportation systems, particularly under increasing urbanization. Traditional methods relying on static sensors often suffer from limited spatial coverage, while probe vehicles provide richer, albeit sparse and irregular data. This work introduces ON-Traffic, a novel deep operator Network and a receding horizon learning-based framework tailored for online estimation of spatio-temporal traffic state along with quantified uncertainty by using measurements from moving probe vehicles and downstream boundary inputs. Our framework is evaluated in both numerical and simulation datasets, showcasing its ability to handle irregular, sparse input data, adapt to time-shifted scenarios, and provide well-calibrated uncertainty estimates. The results demonstrate that the model captures complex traffic phenomena, including shockwaves and congestion propagation, while maintaining robustness to noise and sensor dropout. These advancements present a significant step toward online, adaptive traffic management systems.
Electrical Fault Localisation Over a Distributed Parameter Transmission Line
Oct 20, 2023



Motivated by the need to localise faults along electrical power lines, this paper adopts a frequency-domain approach to parameter estimation for an infinite-dimensional linear dynamical system with one spatial variable. Since the time of the fault is unknown, and voltages and currents are measured at only one end of the line, distance information must be extracted from the post-fault transients. To properly account for high-frequency transient behaviour, the line dynamics is modelled directly by the Telegrapher's equation, rather than the more commonly used lumped-parameter approximations. First, the governing equations are non-dimensionalised to avoid ill-conditioning. A closed-form expression for the transfer function is then derived. Finally, nonlinear least-squares optimisation is employed to search for the fault location. Requirements on fault bandwidth, sensor bandwidth and simulation time-step are also presented. The result is a novel end-to-end algorithm for data generation and fault localisation, the effectiveness of which is demonstrated via simulation.
Learning Flow Functions from Data with Applications to Nonlinear Oscillators
Apr 11, 2023



We describe a recurrent neural network (RNN) based architecture to learn the flow function of a causal, time-invariant and continuous-time control system from trajectory data. By restricting the class of control inputs to piecewise constant functions, we show that learning the flow function is equivalent to learning the input-to-state map of a discrete-time dynamical system. This motivates the use of an RNN together with encoder and decoder networks which map the state of the system to the hidden state of the RNN and back. We show that the proposed architecture is able to approximate the flow function by exploiting the system's causality and time-invariance. The output of the learned flow function model can be queried at any time instant. We experimentally validate the proposed method using models of the Van der Pol and FitzHugh Nagumo oscillators. In both cases, the results demonstrate that the architecture is able to closely reproduce the trajectories of these two systems. For the Van der Pol oscillator, we further show that the trained model generalises to the system's response with a prolonged prediction time horizon as well as control inputs outside the training distribution. For the FitzHugh-Nagumo oscillator, we show that the model accurately captures the input-dependent phenomena of excitability.
Learning-based Design of Luenberger Observers for Autonomous Nonlinear Systems
Oct 04, 2022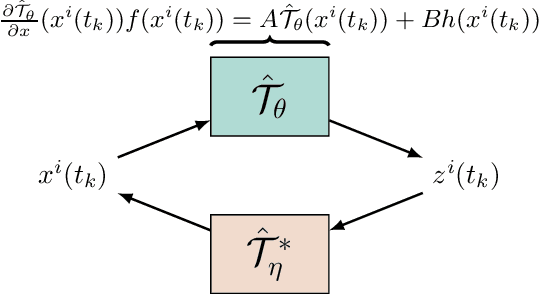
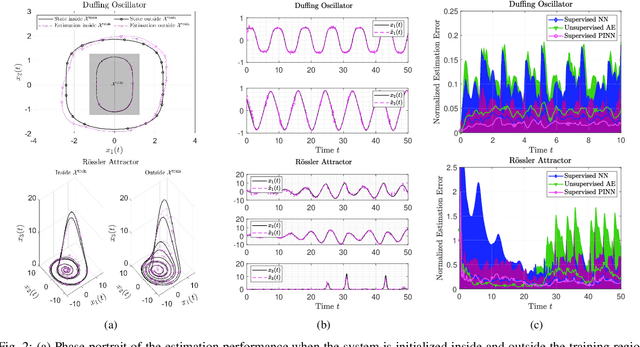
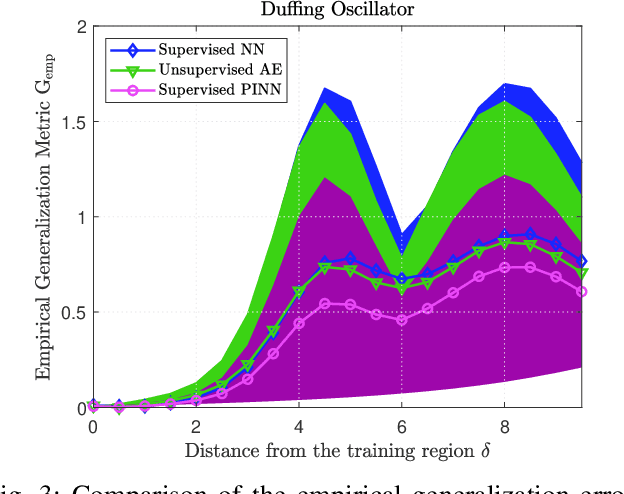
The design of Luenberger observers for nonlinear systems involves state transformation to another coordinate system where the dynamics are asymptotically stable and linear up to output injection. The observer then provides a state estimate in the original coordinates by inverting the transformation map. For general nonlinear systems, however, the main challenge is to find such a transformation and to ensure that it is injective. This paper addresses this challenge by proposing a learning method that employs supervised physics-informed neural networks to approximate both the transformation and its inverse. It is shown that the proposed method exhibits better generalization capabilities than other contemporary methods. Moreover, the observer is shown to be robust under the neural network's approximation error and the system uncertainties.