 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSense Less, Generate More: Pre-training LiDAR Perception with Masked Autoencoders for Ultra-Efficient 3D Sensing
Jun 12, 2024In this work, we propose a disruptively frugal LiDAR perception dataflow that generates rather than senses parts of the environment that are either predictable based on the extensive training of the environment or have limited consequence to the overall prediction accuracy. Therefore, the proposed methodology trades off sensing energy with training data for low-power robotics and autonomous navigation to operate frugally with sensors, extending their lifetime on a single battery charge. Our proposed generative pre-training strategy for this purpose, called as radially masked autoencoding (R-MAE), can also be readily implemented in a typical LiDAR system by selectively activating and controlling the laser power for randomly generated angular regions during on-field operations. Our extensive evaluations show that pre-training with R-MAE enables focusing on the radial segments of the data, thereby capturing spatial relationships and distances between objects more effectively than conventional procedures. Therefore, the proposed methodology not only reduces sensing energy but also improves prediction accuracy. For example, our extensive evaluations on Waymo, nuScenes, and KITTI datasets show that the approach achieves over a 5% average precision improvement in detection tasks across datasets and over a 4% accuracy improvement in transferring domains from Waymo and nuScenes to KITTI. In 3D object detection, it enhances small object detection by up to 4.37% in AP at moderate difficulty levels in the KITTI dataset. Even with 90% radial masking, it surpasses baseline models by up to 5.59% in mAP/mAPH across all object classes in the Waymo dataset. Additionally, our method achieves up to 3.17% and 2.31% improvements in mAP and NDS, respectively, on the nuScenes dataset, demonstrating its effectiveness with both single and fused LiDAR-camera modalities. https://github.com/sinatayebati/Radial_MAE.
STARNet: Sensor Trustworthiness and Anomaly Recognition via Approximated Likelihood Regret for Robust Edge Autonomy
Sep 20, 2023



Complex sensors such as LiDAR, RADAR, and event cameras have proliferated in autonomous robotics to enhance perception and understanding of the environment. Meanwhile, these sensors are also vulnerable to diverse failure mechanisms that can intricately interact with their operation environment. In parallel, the limited availability of training data on complex sensors also affects the reliability of their deep learning-based prediction flow, where their prediction models can fail to generalize to environments not adequately captured in the training set. To address these reliability concerns, this paper introduces STARNet, a Sensor Trustworthiness and Anomaly Recognition Network designed to detect untrustworthy sensor streams that may arise from sensor malfunctions and/or challenging environments. We specifically benchmark STARNet on LiDAR and camera data. STARNet employs the concept of approximated likelihood regret, a gradient-free framework tailored for low-complexity hardware, especially those with only fixed-point precision capabilities. Through extensive simulations, we demonstrate the efficacy of STARNet in detecting untrustworthy sensor streams in unimodal and multimodal settings. In particular, the network shows superior performance in addressing internal sensor failures, such as cross-sensor interference and crosstalk. In diverse test scenarios involving adverse weather and sensor malfunctions, we show that STARNet enhances prediction accuracy by approximately 10% by filtering out untrustworthy sensor streams. STARNet is publicly available at \url{https://github.com/sinatayebati/STARNet}.
Containing Analog Data Deluge at Edge through Frequency-Domain Compression in Collaborative Compute-in-Memory Networks
Sep 20, 2023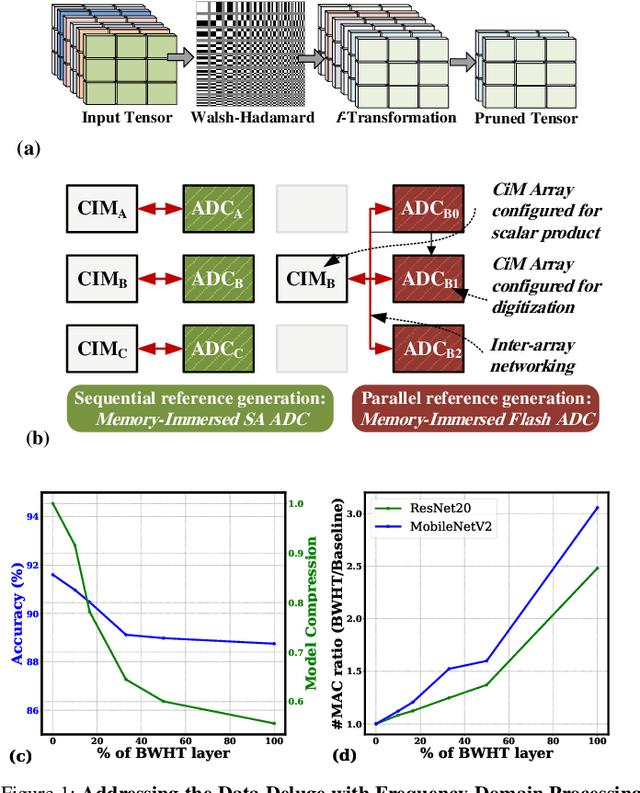
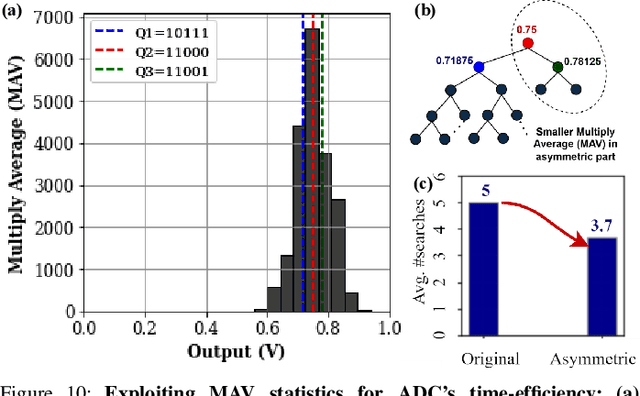
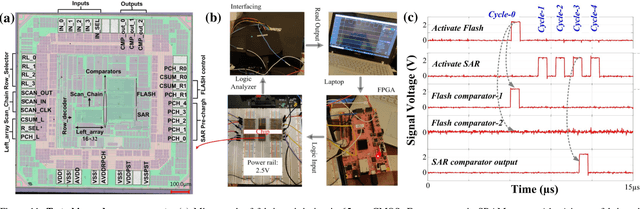
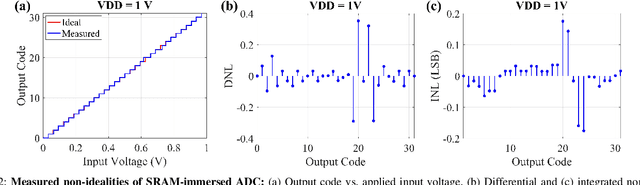
Edge computing is a promising solution for handling high-dimensional, multispectral analog data from sensors and IoT devices for applications such as autonomous drones. However, edge devices' limited storage and computing resources make it challenging to perform complex predictive modeling at the edge. Compute-in-memory (CiM) has emerged as a principal paradigm to minimize energy for deep learning-based inference at the edge. Nevertheless, integrating storage and processing complicates memory cells and/or memory peripherals, essentially trading off area efficiency for energy efficiency. This paper proposes a novel solution to improve area efficiency in deep learning inference tasks. The proposed method employs two key strategies. Firstly, a Frequency domain learning approach uses binarized Walsh-Hadamard Transforms, reducing the necessary parameters for DNN (by 87% in MobileNetV2) and enabling compute-in-SRAM, which better utilizes parallelism during inference. Secondly, a memory-immersed collaborative digitization method is described among CiM arrays to reduce the area overheads of conventional ADCs. This facilitates more CiM arrays in limited footprint designs, leading to better parallelism and reduced external memory accesses. Different networking configurations are explored, where Flash, SA, and their hybrid digitization steps can be implemented using the memory-immersed scheme. The results are demonstrated using a 65 nm CMOS test chip, exhibiting significant area and energy savings compared to a 40 nm-node 5-bit SAR ADC and 5-bit Flash ADC. By processing analog data more efficiently, it is possible to selectively retain valuable data from sensors and alleviate the challenges posed by the analog data deluge.
Robust Monocular Localization of Drones by Adapting Domain Maps to Depth Prediction Inaccuracies
Oct 27, 2022

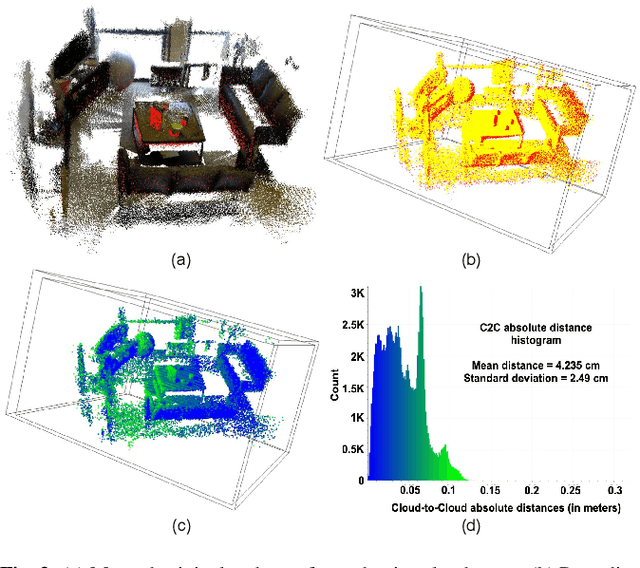
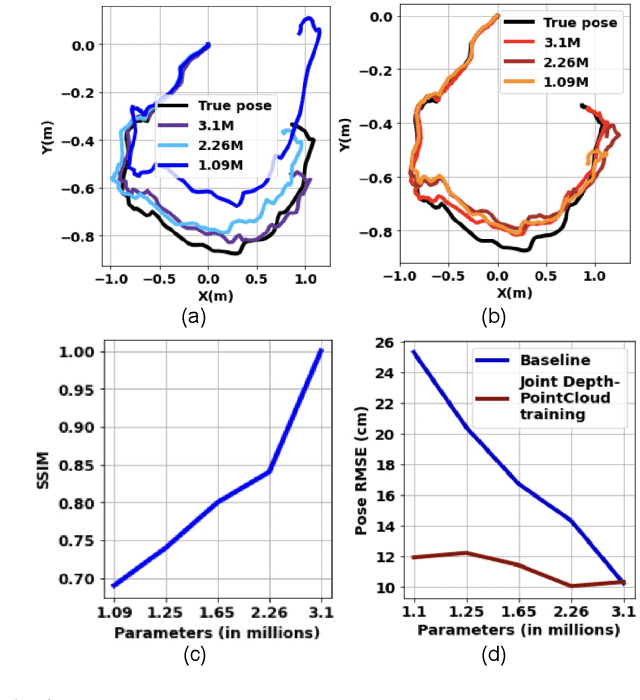
We present a novel monocular localization framework by jointly training deep learning-based depth prediction and Bayesian filtering-based pose reasoning. The proposed cross-modal framework significantly outperforms deep learning-only predictions with respect to model scalability and tolerance to environmental variations. Specifically, we show little-to-no degradation of pose accuracy even with extremely poor depth estimates from a lightweight depth predictor. Our framework also maintains high pose accuracy in extreme lighting variations compared to standard deep learning, even without explicit domain adaptation. By openly representing the map and intermediate feature maps (such as depth estimates), our framework also allows for faster updates and reusing intermediate predictions for other tasks, such as obstacle avoidance, resulting in much higher resource efficiency.