 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Non-Stationary Space-Time Models for Environmental Monitoring
Apr 27, 2018


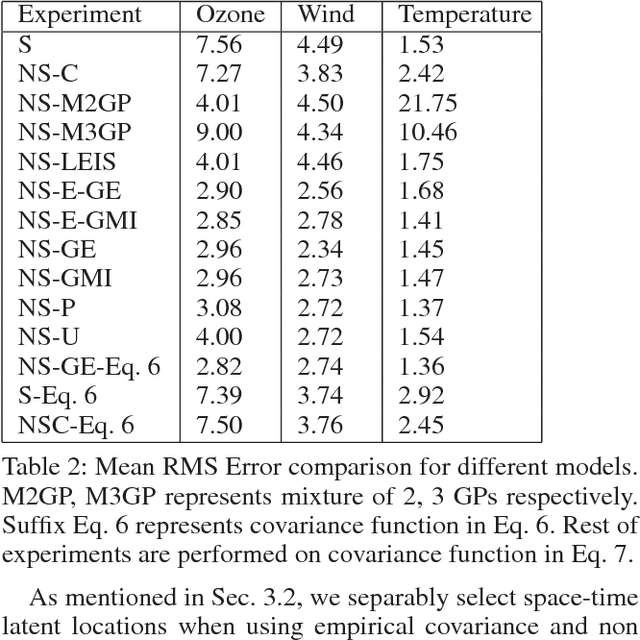
One of the primary aspects of sustainable development involves accurate understanding and modeling of environmental phenomena. Many of these phenomena exhibit variations in both space and time and it is imperative to develop a deeper understanding of techniques that can model space-time dynamics accurately. In this paper we propose NOSTILL-GP - NOn-stationary Space TIme variable Latent Length scale GP, a generic non-stationary, spatio-temporal Gaussian Process (GP) model. We present several strategies, for efficient training of our model, necessary for real-world applicability. Extensive empirical validation is performed using three real-world environmental monitoring datasets, with diverse dynamics across space and time. Results from the experiments clearly demonstrate general applicability and effectiveness of our approach for applications in environmental monitoring.
Adaptive Sensing for Learning Nonstationary Environment Models
Apr 26, 2018

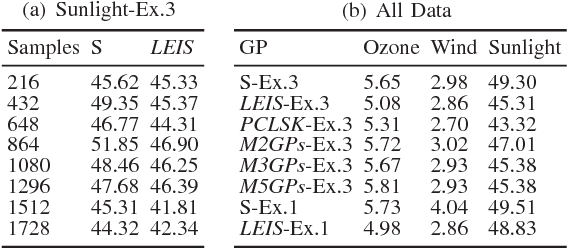
Most environmental phenomena, such as wind profiles, ozone concentration and sunlight distribution under a forest canopy, exhibit nonstationary dynamics i.e. phenomenon variation change depending on the location and time of occurrence. Non-stationary dynamics pose both theoretical and practical challenges to statistical machine learning algorithms aiming to accurately capture the complexities governing the evolution of such processes. In this paper, we address the sampling aspects of the problem of learning nonstationary spatio-temporal models, and propose an efficient yet simple algorithm - LISAL. The core idea in LISAL is to learn two models using Gaussian processes (GPs) wherein the first is a nonstationary GP directly modeling the phenomenon. The second model uses a stationary GP representing a latent space corresponding to changes in dynamics, or the nonstationarity characteristics of the first model. LISAL involves adaptively sampling the latent space dynamics using information theory quantities to reduce the computational cost during the learning phase. The relevance of LISAL is extensively validated using multiple real world datasets.
How good is good enough? Re-evaluating the bar for energy disaggregation
Oct 26, 2015
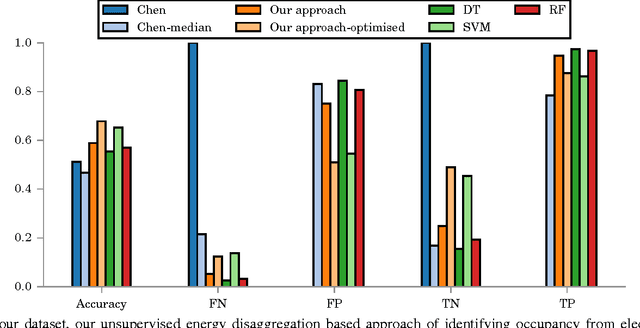
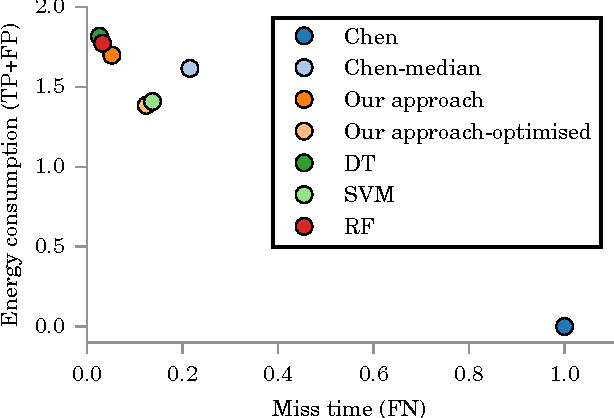
Since the early 1980s, the research community has developed ever more sophisticated algorithms for the problem of energy disaggregation, but despite decades of research, there is still a dearth of applications with demonstrated value. In this work, we explore a question that is highly pertinent to this research community: how good does energy disaggregation need to be in order to infer characteristics of a household? We present novel techniques that use unsupervised energy disaggregation to predict both household occupancy and static properties of the household such as size of the home and number of occupants. Results show that basic disaggregation approaches performs up to 30% better at occupancy estimation than using aggregate power data alone, and are up to 10% better at estimating static household characteristics. These results show that even rudimentary energy disaggregation techniques are sufficient for improved inference of household characteristics. To conclude, we re-evaluate the bar set by the community for energy disaggregation accuracy and try to answer the question "how good is good enough?"
Neighbourhood NILM: A Big-data Approach to Household Energy Disaggregation
Oct 26, 2015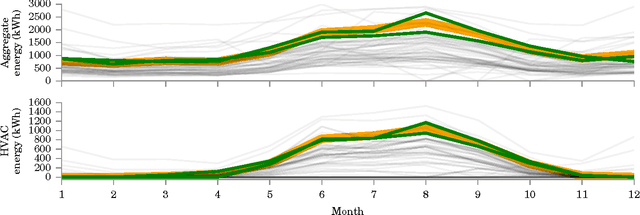
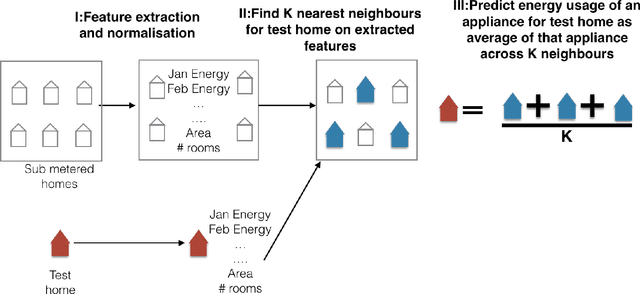
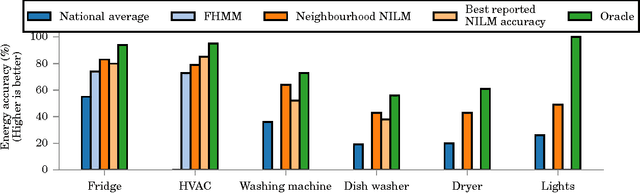

In this paper, we investigate whether "big-data" is more valuable than "precise" data for the problem of energy disaggregation: the process of breaking down aggregate energy usage on a per-appliance basis. Existing techniques for disaggregation rely on energy metering at a resolution of 1 minute or higher, but most power meters today only provide a reading once per month, and at most once every 15 minutes. In this paper, we propose a new technique called Neighbourhood NILM that leverages data from 'neighbouring' homes to disaggregate energy given only a single energy reading per month. The key intuition behind our approach is that 'similar' homes have 'similar' energy consumption on a per-appliance basis. Neighbourhood NILM matches every home with a set of 'neighbours' that have direct submetering infrastructure, i.e. power meters on individual circuits or loads. Many such homes already exist. Then, it estimates the appliance-level energy consumption of the target home to be the average of its K neighbours. We evaluate this approach using 25 homes and results show that our approach gives comparable or better disaggregation in comparison to state-of-the-art accuracy reported in the literature that depend on manual model training, high frequency power metering, or both. Results show that Neighbourhood NILM can achieve 83% and 79% accuracy disaggregating fridge and heating/cooling loads, compared to 74% and 73% for a technique called FHMM. Furthermore, it achieves up to 64% accuracy on washing machine, dryer, dishwasher, and lighting loads, which is higher than previously reported results. Many existing techniques are not able to disaggregate these loads at all. These results indicate a potentially substantial advantage to installing submetering infrastructure in a select few homes rather than installing new high-frequency smart metering infrastructure in all homes.
Efficient Informative Sensing using Multiple Robots
Jan 15, 2014



The need for efficient monitoring of spatio-temporal dynamics in large environmental applications, such as the water quality monitoring in rivers and lakes, motivates the use of robotic sensors in order to achieve sufficient spatial coverage. Typically, these robots have bounded resources, such as limited battery or limited amounts of time to obtain measurements. Thus, careful coordination of their paths is required in order to maximize the amount of information collected, while respecting the resource constraints. In this paper, we present an efficient approach for near-optimally solving the NP-hard optimization problem of planning such informative paths. In particular, we first develop eSIP (efficient Single-robot Informative Path planning), an approximation algorithm for optimizing the path of a single robot. Hereby, we use a Gaussian Process to model the underlying phenomenon, and use the mutual information between the visited locations and remainder of the space to quantify the amount of information collected. We prove that the mutual information collected using paths obtained by using eSIP is close to the information obtained by an optimal solution. We then provide a general technique, sequential allocation, which can be used to extend any single robot planning algorithm, such as eSIP, for the multi-robot problem. This procedure approximately generalizes any guarantees for the single-robot problem to the multi-robot case. We extensively evaluate the effectiveness of our approach on several experiments performed in-field for two important environmental sensing applications, lake and river monitoring, and simulation experiments performed using several real world sensor network data sets.