 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJuxtaposition of System Dynamics and Agent-based Simulation for a Case Study in Immunosenescence
Jul 20, 2016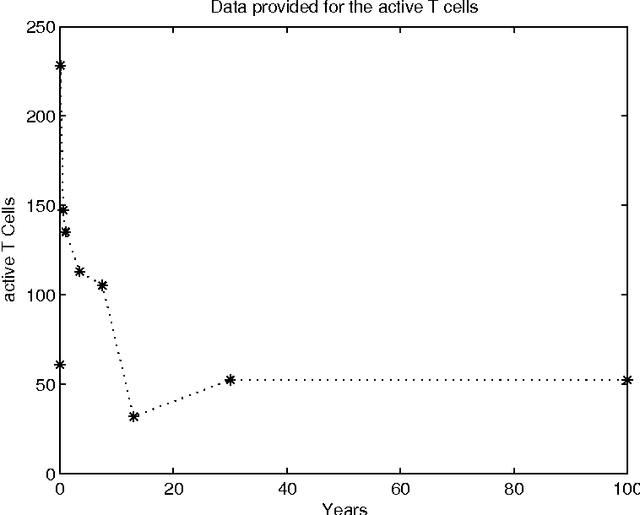
Advances in healthcare and in the quality of life significantly increase human life expectancy. With the ageing of populations, new un-faced challenges are brought to science. The human body is naturally selected to be well-functioning until the age of reproduction to keep the species alive. However, as the lifespan extends, unseen problems due to the body deterioration emerge. There are several age-related diseases with no appropriate treatment; therefore, the complex ageing phenomena needs further understanding. Immunosenescence, the ageing of the immune system, is highly correlated to the negative effects of ageing, such as the increase of auto-inflammatory diseases and decrease in responsiveness to new diseases. Besides clinical and mathematical tools, we believe there is opportunity to further exploit simulation tools to understand immunosenescence. Compared to real-world experimentation, benefits include time and cost effectiveness due to the laborious, resource-intensiveness of the biological environment and the possibility of conducting experiments without ethic restrictions. Contrasted with mathematical models, simulation modelling is more suitable for representing complex systems and emergence. In addition, there is the belief that simulation models are easier to communicate in interdisciplinary contexts. Our work investigates the usefulness of simulations to understand immunosenescence by employing two different simulation methods, agent-based and system dynamics simulation, to a case study of immune cells depletion with age.
Data classification using the Dempster-Shafer method
Sep 02, 2014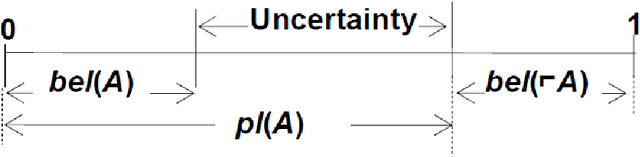
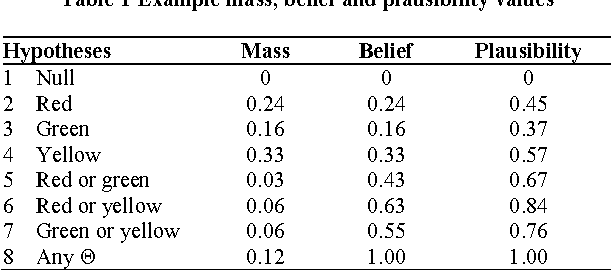
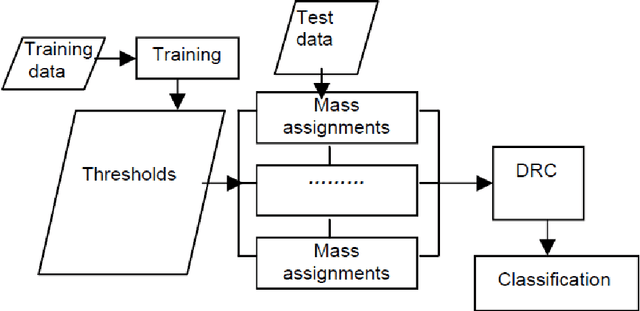
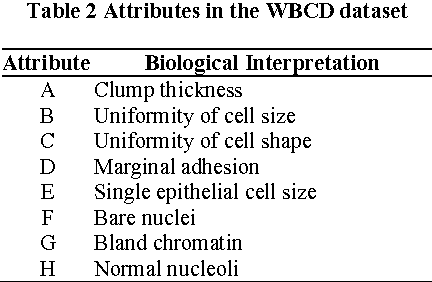
In this paper, the Dempster-Shafer method is employed as the theoretical basis for creating data classification systems. Testing is carried out using three popular (multiple attribute) benchmark datasets that have two, three and four classes. In each case, a subset of the available data is used for training to establish thresholds, limits or likelihoods of class membership for each attribute, and hence create mass functions that establish probability of class membership for each attribute of the test data. Classification of each data item is achieved by combination of these probabilities via Dempster's Rule of Combination. Results for the first two datasets show extremely high classification accuracy that is competitive with other popular methods. The third dataset is non-numerical and difficult to classify, but good results can be achieved provided the system and mass functions are designed carefully and the right attributes are chosen for combination. In all cases the Dempster-Shafer method provides comparable performance to other more popular algorithms, but the overhead of generating accurate mass functions increases the complexity with the addition of new attributes. Overall, the results suggest that the D-S approach provides a suitable framework for the design of classification systems and that automating the mass function design and calculation would increase the viability of the algorithm for complex classification problems.
Real-world Transfer of Evolved Artificial Immune System Behaviours between Small and Large Scale Robotic Platforms
May 31, 2013



In mobile robotics, a solid test for adaptation is the ability of a control system to function not only in a diverse number of physical environments, but also on a number of different robotic platforms. This paper demonstrates that a set of behaviours evolved in simulation on a miniature robot (epuck) can be transferred to a much larger-scale platform (Pioneer), both in simulation and in the real world. The chosen architecture uses artificial evolution of epuck behaviours to obtain a genetic sequence, which is then employed to seed an idiotypic, artificial immune system (AIS) on the Pioneers. Despite numerous hardware and software differences between the platforms, navigation and target-finding experiments show that the evolved behaviours transfer very well to the larger robot when the idiotypic AIS technique is used. In contrast, transferability is poor when reinforcement learning alone is used, which validates the adaptability of the chosen architecture.
The Transfer of Evolved Artificial Immune System Behaviours between Small and Large Scale Robotic Platforms
Jun 25, 2010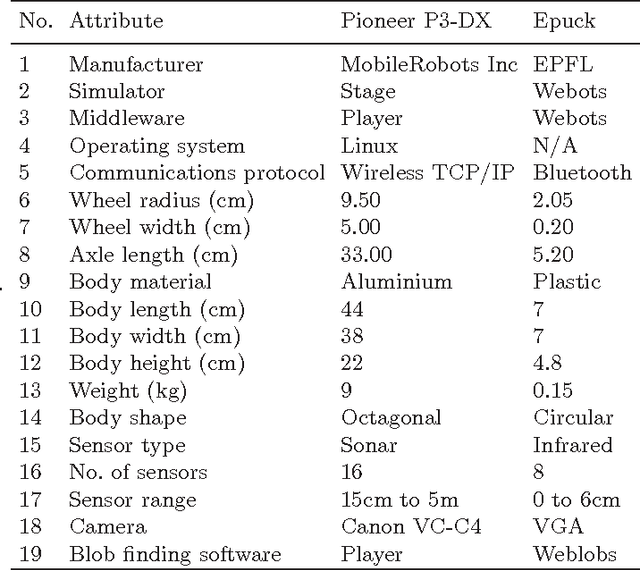
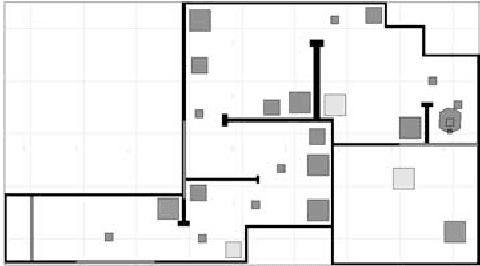
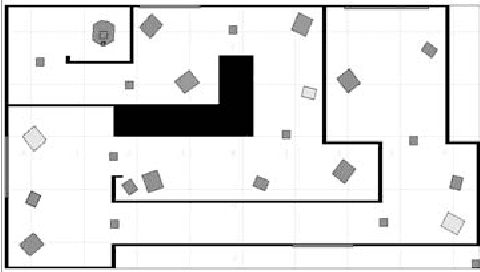
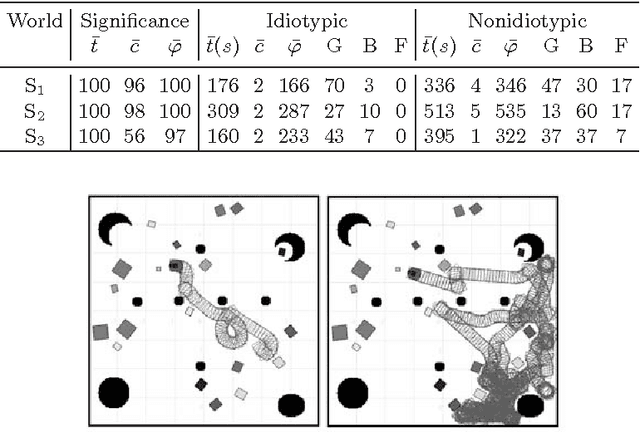
This paper demonstrates that a set of behaviours evolved in simulation on a miniature robot (epuck) can be transferred to a much larger scale platform (a virtual Pioneer P3-DX) that also differs in shape, sensor type, sensor configuration and programming interface. The chosen architecture uses a reinforcement learning-assisted genetic algorithm to evolve the epuck behaviours, which are encoded as a genetic sequence. This sequence is then used by the Pioneers as part of an adaptive, idiotypic artificial immune system (AIS) control architecture. Testing in three different simulated worlds shows that the Pioneer can use these behaviours to navigate and solve object-tracking tasks successfully, as long as its adaptive AIS mechanism is in place.
* 12 pages, 3 figures, 2 tables, 9th International Conference on Artificial Evolution (EA 09),
Artificial Immune Systems
Jun 25, 2010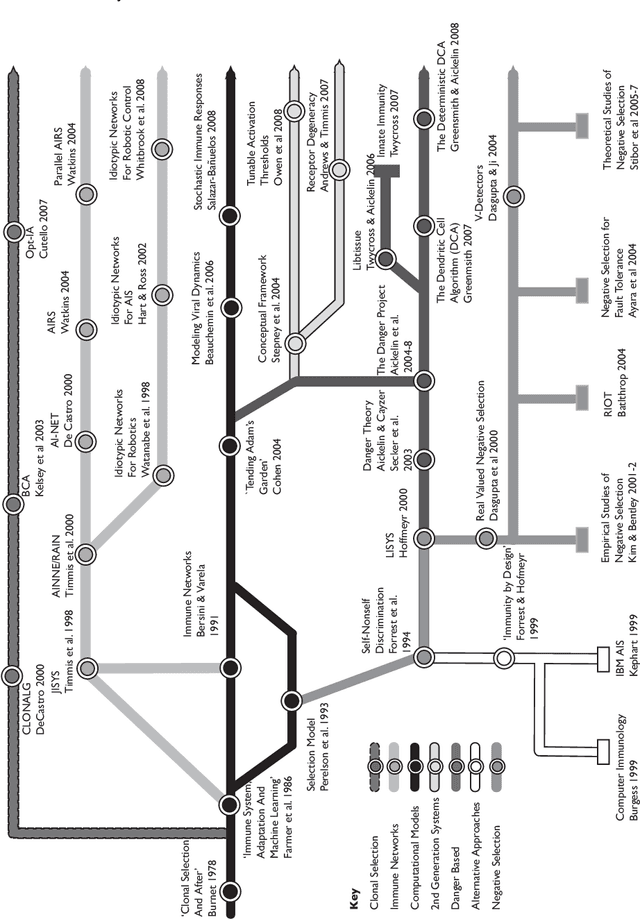
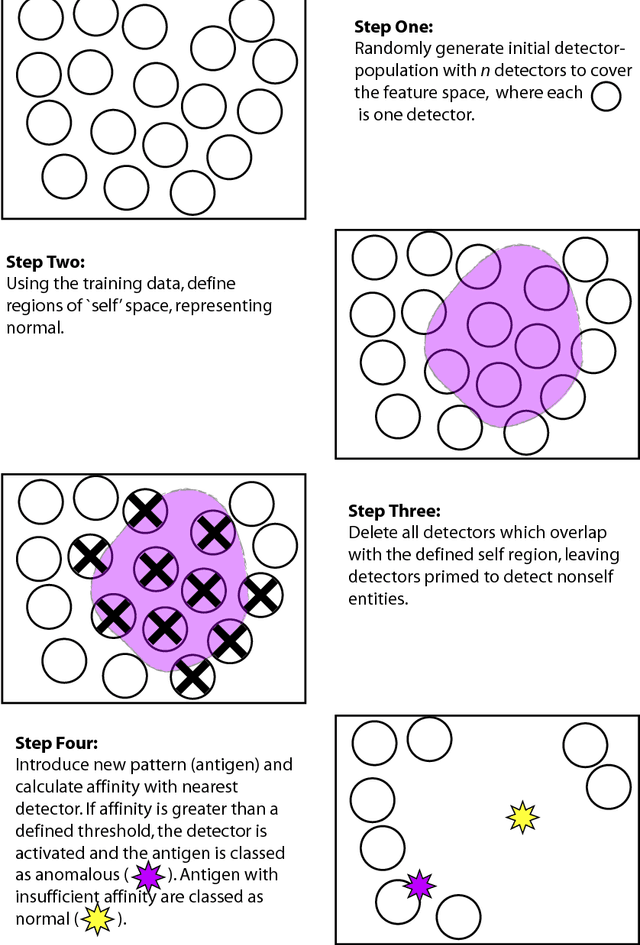
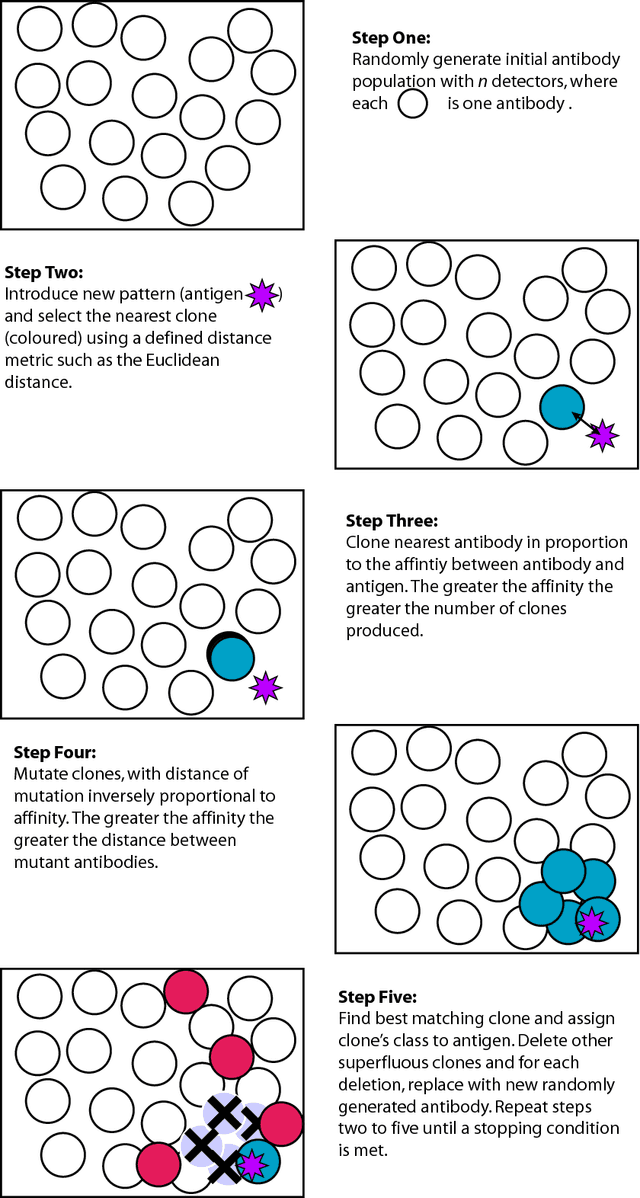
The human immune system has numerous properties that make it ripe for exploitation in the computational domain, such as robustness and fault tolerance, and many different algorithms, collectively termed Artificial Immune Systems (AIS), have been inspired by it. Two generations of AIS are currently in use, with the first generation relying on simplified immune models and the second generation utilising interdisciplinary collaboration to develop a deeper understanding of the immune system and hence produce more complex models. Both generations of algorithms have been successfully applied to a variety of problems, including anomaly detection, pattern recognition, optimisation and robotics. In this chapter an overview of AIS is presented, its evolution is discussed, and it is shown that the diversification of the field is linked to the diversity of the immune system itself, leading to a number of algorithms as opposed to one archetypal system. Two case studies are also presented to help provide insight into the mechanisms of AIS; these are the idiotypic network approach and the Dendritic Cell Algorithm.
Detecting Anomalous Process Behaviour using Second Generation Artificial Immune Systems
Jun 18, 2010



Artificial Immune Systems have been successfully applied to a number of problem domains including fault tolerance and data mining, but have been shown to scale poorly when applied to computer intrusion detec- tion despite the fact that the biological immune system is a very effective anomaly detector. This may be because AIS algorithms have previously been based on the adaptive immune system and biologically-naive mod- els. This paper focuses on describing and testing a more complex and biologically-authentic AIS model, inspired by the interactions between the innate and adaptive immune systems. Its performance on a realistic process anomaly detection problem is shown to be better than standard AIS methods (negative-selection), policy-based anomaly detection methods (systrace), and an alternative innate AIS approach (the DCA). In addition, it is shown that runtime information can be used in combination with system call information to enhance detection capability.
The Use of Probabilistic Systems to Mimic the Behaviour of Idiotypic AIS Robot Controllers
Jun 18, 2010



Previous work has shown that robot navigation systems that employ an architecture based upon the idiotypic network theory of the immune system have an advantage over control techniques that rely on reinforcement learning only. This is thought to be a result of intelligent behaviour selection on the part of the idiotypic robot. In this paper an attempt is made to imitate idiotypic dynamics by creating controllers that use reinforcement with a number of different probabilistic schemes to select robot behaviour. The aims are to show that the idiotypic system is not merely performing some kind of periodic random behaviour selection, and to try to gain further insight into the processes that govern the idiotypic mechanism. Trials are carried out using simulated Pioneer robots that undertake navigation exercises. Results show that a scheme that boosts the probability of selecting highly-ranked alternative behaviours to 50% during stall conditions comes closest to achieving the properties of the idiotypic system, but remains unable to match it in terms of all round performance.
* 8 pages, 6 tables, 2 figures, Journal of Systemics, Cybernetics and Informatics
Two-Timescale Learning Using Idiotypic Behaviour Mediation For A Navigating Mobile Robot
Jun 15, 2010



A combined Short-Term Learning (STL) and Long-Term Learning (LTL) approach to solving mobile-robot navigation problems is presented and tested in both the real and virtual domains. The LTL phase consists of rapid simulations that use a Genetic Algorithm to derive diverse sets of behaviours, encoded as variable sets of attributes, and the STL phase is an idiotypic Artificial Immune System. Results from the LTL phase show that sets of behaviours develop very rapidly, and significantly greater diversity is obtained when multiple autonomous populations are used, rather than a single one. The architecture is assessed under various scenarios, including removal of the LTL phase and switching off the idiotypic mechanism in the STL phase. The comparisons provide substantial evidence that the best option is the inclusion of both the LTL phase and the idiotypic system. In addition, this paper shows that structurally different environments can be used for the two phases without compromising transferability.
* 40 pages, 12 tables, Journal of Applied Soft Computing
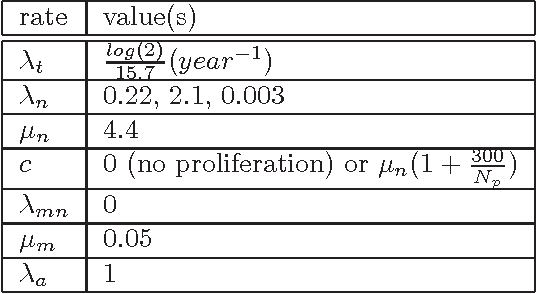
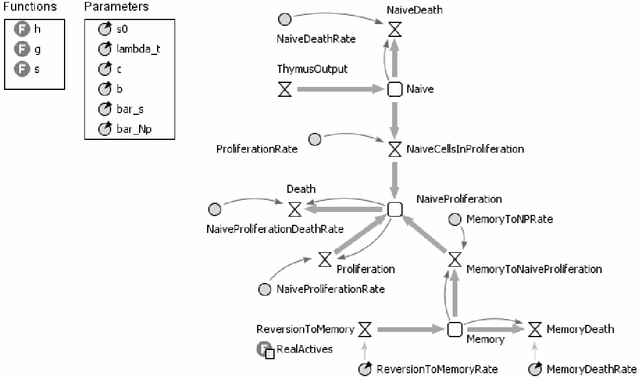
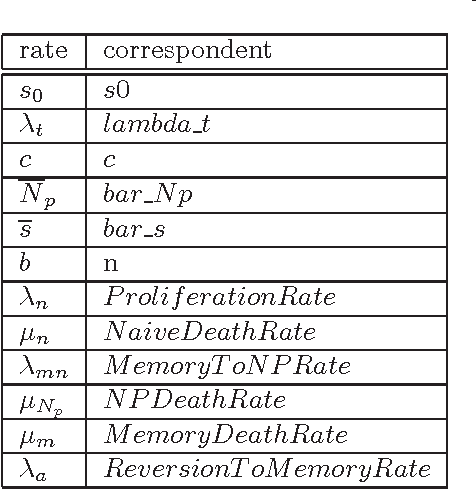
System Dynamics Modelling of the Processes Involving the Maintenance of the Naive T Cell Repertoire
Apr 29, 2010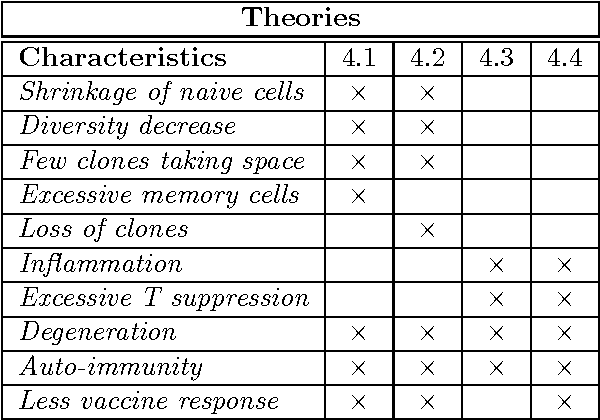
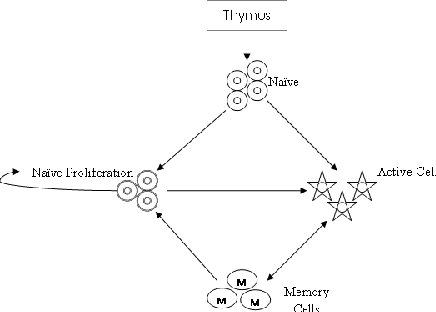
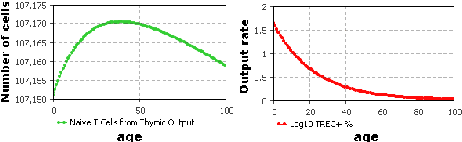
The study of immune system aging, i.e. immunosenescence, is a relatively new research topic. It deals with understanding the processes of immunodegradation that indicate signs of functionality loss possibly leading to death. Even though it is not possible to prevent immunosenescence, there is great benefit in comprehending its causes, which may help to reverse some of the damage done and thus improve life expectancy. One of the main factors influencing the process of immunosenescence is the number and phenotypical variety of naive T cells in an individual. This work presents a review of immunosenescence, proposes system dynamics modelling of the processes involving the maintenance of the naive T cell repertoire and presents some preliminary results.
* 6 pages, 2 figures, 1 table, 9th Annual Workshop on Computational Intelligence (UKCI 2009), Nottingham, UK
Mimicking the Behaviour of Idiotypic AIS Robot Controllers Using Probabilistic Systems
Mar 22, 2010



Previous work has shown that robot navigation systems that employ an architecture based upon the idiotypic network theory of the immune system have an advantage over control techniques that rely on reinforcement learning only. This is thought to be a result of intelligent behaviour selection on the part of the idiotypic robot. In this paper an attempt is made to imitate idiotypic dynamics by creating controllers that use reinforcement with a number of different probabilistic schemes to select robot behaviour. The aims are to show that the idiotypic system is not merely performing some kind of periodic random behaviour selection, and to try to gain further insight into the processes that govern the idiotypic mechanism. Trials are carried out using simulated Pioneer robots that undertake navigation exercises. Results show that a scheme that boosts the probability of selecting highly-ranked alternative behaviours to 50% during stall conditions comes closest to achieving the properties of the idiotypic system, but remains unable to match it in terms of all round performance.
* 7 pages, 2 figures, 6 tables, 13th World Multi-Conference on Systemics, Cybernetics and Informatics: WMSCI 2009, Orlando, Florida, USA