 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Transfer of Evolved Artificial Immune System Behaviours between Small and Large Scale Robotic Platforms
Paper and Code
Jun 25, 2010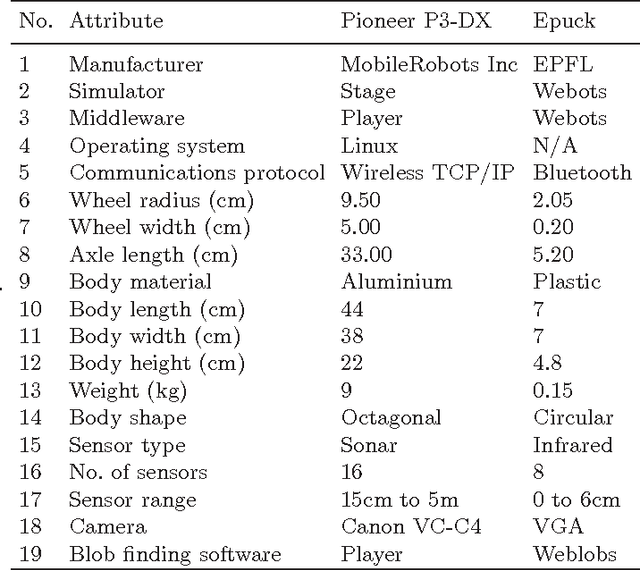
This paper demonstrates that a set of behaviours evolved in simulation on a miniature robot (epuck) can be transferred to a much larger scale platform (a virtual Pioneer P3-DX) that also differs in shape, sensor type, sensor configuration and programming interface. The chosen architecture uses a reinforcement learning-assisted genetic algorithm to evolve the epuck behaviours, which are encoded as a genetic sequence. This sequence is then used by the Pioneers as part of an adaptive, idiotypic artificial immune system (AIS) control architecture. Testing in three different simulated worlds shows that the Pioneer can use these behaviours to navigate and solve object-tracking tasks successfully, as long as its adaptive AIS mechanism is in place.