 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Reinforcement Learning-Based Model for Mapping and Goal-Directed Navigation Using Multiscale Place Fields
Jan 07, 2026Autonomous navigation in complex and partially observable environments remains a central challenge in robotics. Several bio-inspired models of mapping and navigation based on place cells in the mammalian hippocampus have been proposed. This paper introduces a new robust model that employs parallel layers of place fields at multiple spatial scales, a replay-based reward mechanism, and dynamic scale fusion. Simulations show that the model improves path efficiency and accelerates learning compared to single-scale baselines, highlighting the value of multiscale spatial representations for adaptive robot navigation.
A Neuromorphic Model of Learning Meaningful Sequences with Long-Term Memory
Sep 16, 2025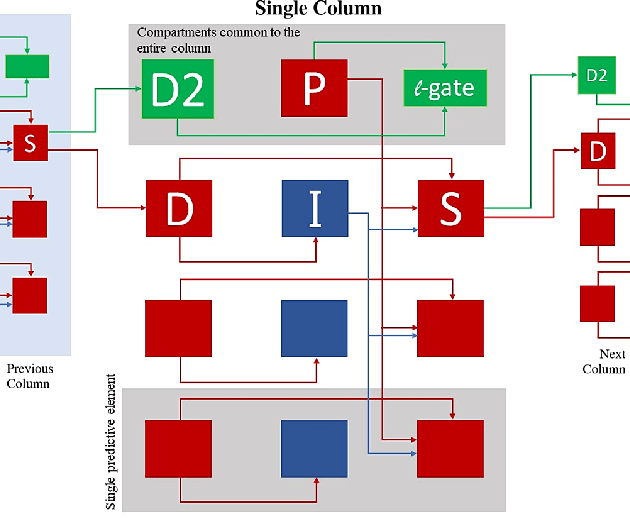



Learning meaningful sentences is different from learning a random set of words. When humans understand the meaning, the learning occurs relatively quickly. What mechanisms enable this to happen? In this paper, we examine the learning of novel sequences in familiar situations. We embed the Small World of Words (SWOW-EN), a Word Association Norms (WAN) dataset, in a spiking neural network based on the Hierarchical Temporal Memory (HTM) model to simulate long-term memory. Results show that in the presence of SWOW-EN, there is a clear difference in speed between the learning of meaningful sentences and random noise. For example, short poems are learned much faster than sequences of random words. In addition, the system initialized with SWOW-EN weights shows greater tolerance to noise.
Position Paper: Bounded Alignment: What (Not) To Expect From AGI Agents
May 17, 2025The issues of AI risk and AI safety are becoming critical as the prospect of artificial general intelligence (AGI) looms larger. The emergence of extremely large and capable generative models has led to alarming predictions and created a stir from boardrooms to legislatures. As a result, AI alignment has emerged as one of the most important areas in AI research. The goal of this position paper is to argue that the currently dominant vision of AGI in the AI and machine learning (AI/ML) community needs to evolve, and that expectations and metrics for its safety must be informed much more by our understanding of the only existing instance of general intelligence, i.e., the intelligence found in animals, and especially in humans. This change in perspective will lead to a more realistic view of the technology, and allow for better policy decisions.
A Comparative Study of Sentence Embedding Models for Assessing Semantic Variation
Aug 08, 2023Analyzing the pattern of semantic variation in long real-world texts such as books or transcripts is interesting from the stylistic, cognitive, and linguistic perspectives. It is also useful for applications such as text segmentation, document summarization, and detection of semantic novelty. The recent emergence of several vector-space methods for sentence embedding has made such analysis feasible. However, this raises the issue of how consistent and meaningful the semantic representations produced by various methods are in themselves. In this paper, we compare several recent sentence embedding methods via time-series of semantic similarity between successive sentences and matrices of pairwise sentence similarity for multiple books of literature. In contrast to previous work using target tasks and curated datasets to compare sentence embedding methods, our approach provides an evaluation of the methods 'in the wild'. We find that most of the sentence embedding methods considered do infer highly correlated patterns of semantic similarity in a given document, but show interesting differences.
DeepCPG Policies for Robot Locomotion
Feb 25, 2023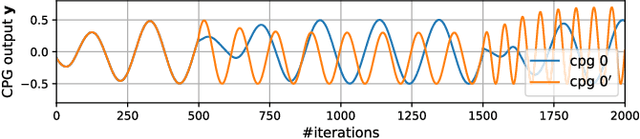
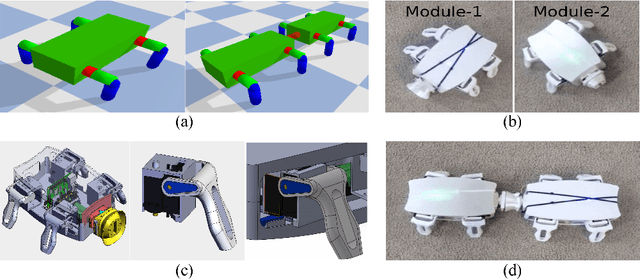
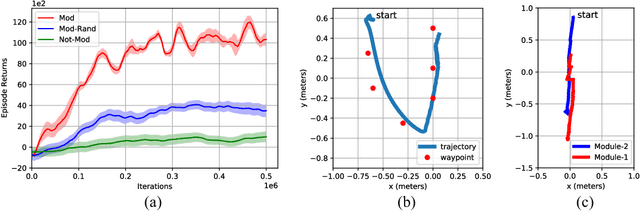
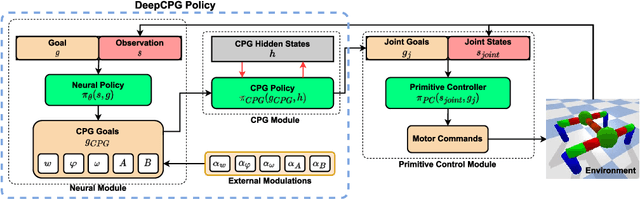
Central Pattern Generators (CPGs) form the neural basis of the observed rhythmic behaviors for locomotion in legged animals. The CPG dynamics organized into networks allow the emergence of complex locomotor behaviors. In this work, we take this inspiration for developing walking behaviors in multi-legged robots. We present novel DeepCPG policies that embed CPGs as a layer in a larger neural network and facilitate end-to-end learning of locomotion behaviors in deep reinforcement learning (DRL) setup. We demonstrate the effectiveness of this approach on physics engine-based insectoid robots. We show that, compared to traditional approaches, DeepCPG policies allow sample-efficient end-to-end learning of effective locomotion strategies even in the case of high-dimensional sensor spaces (vision). We scale the DeepCPG policies using a modular robot configuration and multi-agent DRL. Our results suggest that gradual complexification with embedded priors of these policies in a modular fashion could achieve non-trivial sensor and motor integration on a robot platform. These results also indicate the efficacy of bootstrapping more complex intelligent systems from simpler ones based on biological principles. Finally, we present the experimental results for a proof-of-concept insectoid robot system for which DeepCPG learned policies initially using the simulation engine and these were afterwards transferred to real-world robots without any additional fine-tuning.
Soft-Sensing ConFormer: A Curriculum Learning-based Convolutional Transformer
Nov 12, 2021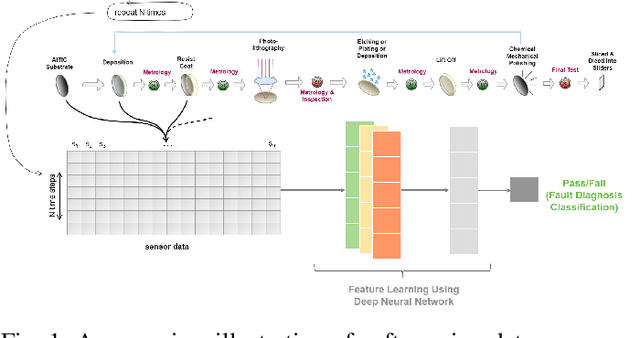
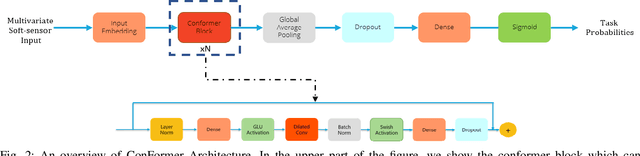
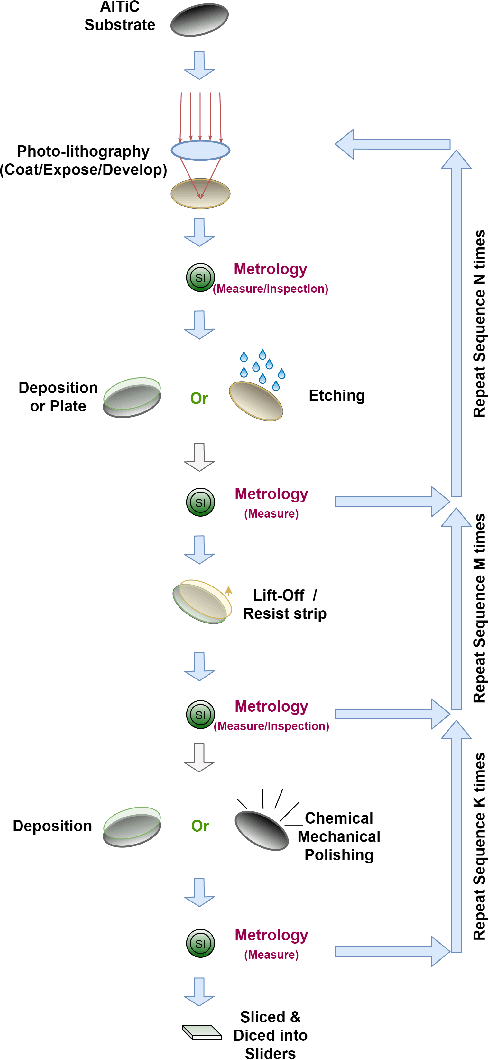
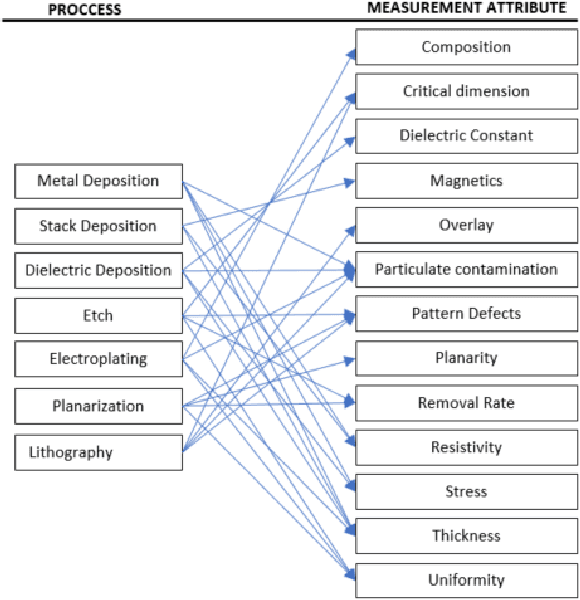
Over the last few decades, modern industrial processes have investigated several cost-effective methodologies to improve the productivity and yield of semiconductor manufacturing. While playing an essential role in facilitating real-time monitoring and control, the data-driven soft-sensors in industries have provided a competitive edge when augmented with deep learning approaches for wafer fault-diagnostics. Despite the success of deep learning methods across various domains, they tend to suffer from bad performance on multi-variate soft-sensing data domains. To mitigate this, we propose a soft-sensing ConFormer (CONvolutional transFORMER) for wafer fault-diagnostic classification task which primarily consists of multi-head convolution modules that reap the benefits of fast and light-weight operations of convolutions, and also the ability to learn the robust representations through multi-head design alike transformers. Another key issue is that traditional learning paradigms tend to suffer from low performance on noisy and highly-imbalanced soft-sensing data. To address this, we augment our soft-sensing ConFormer model with a curriculum learning-based loss function, which effectively learns easy samples in the early phase of training and difficult ones later. To further demonstrate the utility of our proposed architecture, we performed extensive experiments on various toolsets of Seagate Technology's wafer manufacturing process which are shared openly along with this work. To the best of our knowledge, this is the first time that curriculum learning-based soft-sensing ConFormer architecture has been proposed for soft-sensing data and our results show strong promise for future use in soft-sensing research domain.
Robust Deep Reinforcement Learning for Quadcopter Control
Nov 06, 2021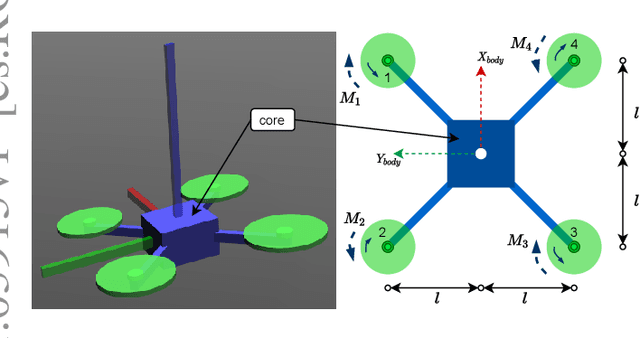
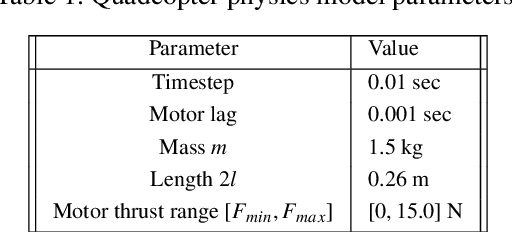
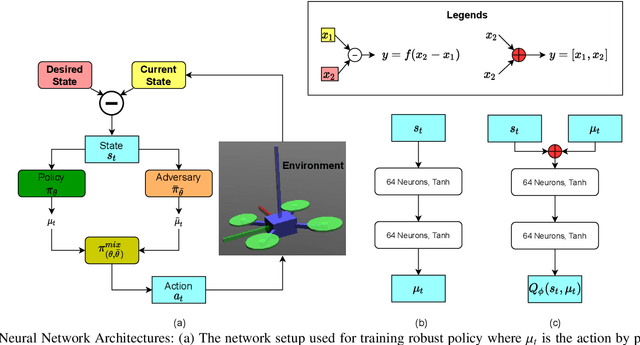
Deep reinforcement learning (RL) has made it possible to solve complex robotics problems using neural networks as function approximators. However, the policies trained on stationary environments suffer in terms of generalization when transferred from one environment to another. In this work, we use Robust Markov Decision Processes (RMDP) to train the drone control policy, which combines ideas from Robust Control and RL. It opts for pessimistic optimization to handle potential gaps between policy transfer from one environment to another. The trained control policy is tested on the task of quadcopter positional control. RL agents were trained in a MuJoCo simulator. During testing, different environment parameters (unseen during the training) were used to validate the robustness of the trained policy for transfer from one environment to another. The robust policy outperformed the standard agents in these environments, suggesting that the added robustness increases generality and can adapt to non-stationary environments. Codes: https://github.com/adipandas/gym_multirotor
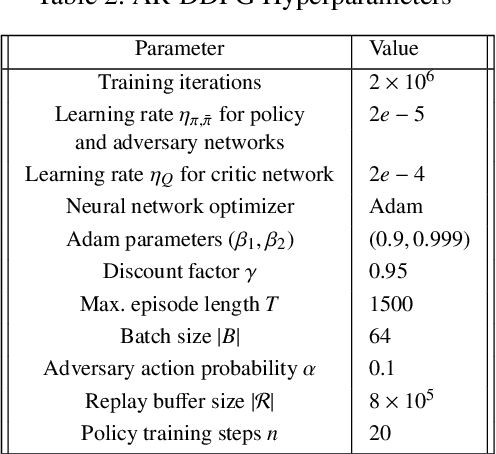
Developmental Reinforcement Learning of Control Policy of a Quadcopter UAV with Thrust Vectoring Rotors
Jul 15, 2020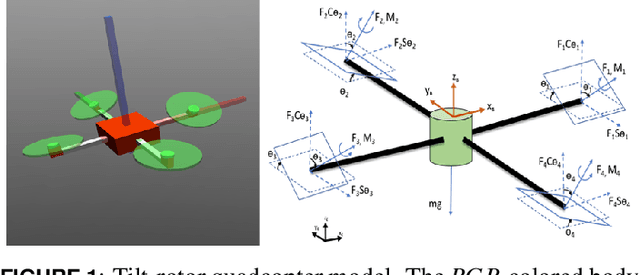
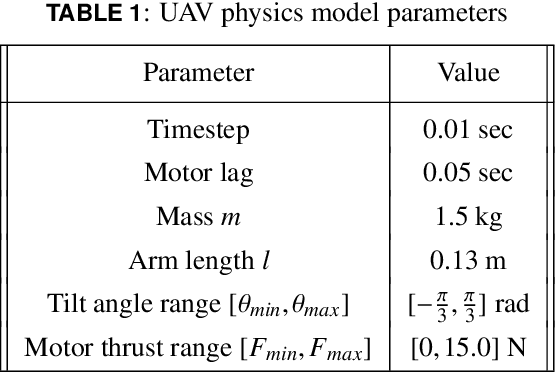
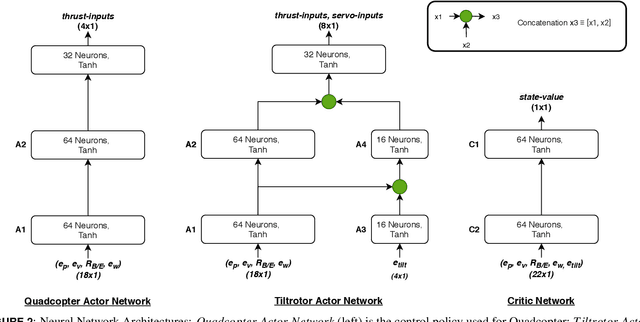
In this paper, we present a novel developmental reinforcement learning-based controller for a quadcopter with thrust vectoring capabilities. This multirotor UAV design has tilt-enabled rotors. It utilizes the rotor force magnitude and direction to achieve the desired state during flight. The control policy of this robot is learned using the policy transfer from the learned controller of the quadcopter (comparatively simple UAV design without thrust vectoring). This approach allows learning a control policy for systems with multiple inputs and multiple outputs. The performance of the learned policy is evaluated by physics-based simulations for the tasks of hovering and way-point navigation. The flight simulations utilize a flight controller based on reinforcement learning without any additional PID components. The results show faster learning with the presented approach as opposed to learning the control policy from scratch for this new UAV design created by modifications in a conventional quadcopter, i.e., the addition of more degrees of freedom (4-actuators in conventional quadcopter to 8-actuators in tilt-rotor quadcopter). We demonstrate the robustness of our learned policy by showing the recovery of the tilt-rotor platform in the simulation from various non-static initial conditions in order to reach a desired state. The developmental policy for the tilt-rotor UAV also showed superior fault tolerance when compared with the policy learned from the scratch. The results show the ability of the presented approach to bootstrap the learned behavior from a simpler system (lower-dimensional action-space) to a more complex robot (comparatively higher-dimensional action-space) and reach better performance faster.
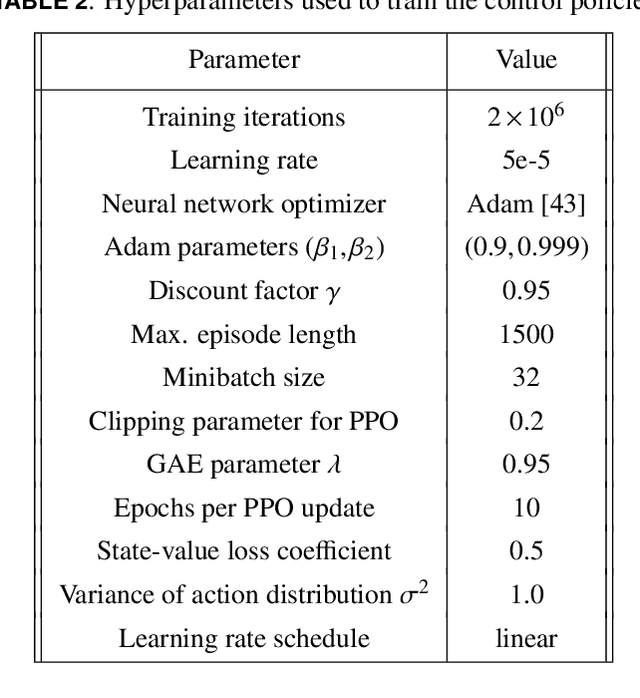
One-Shot Recognition of Manufacturing Defects in Steel Surfaces
May 12, 2020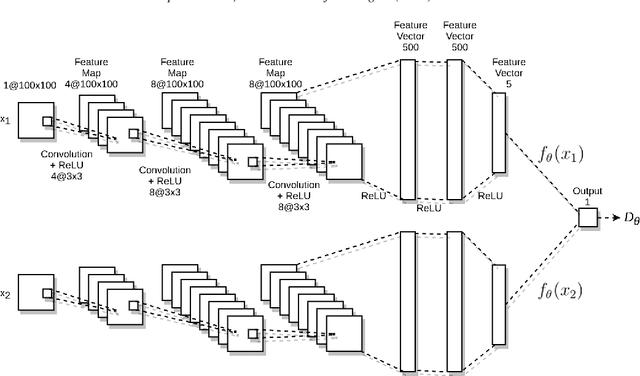
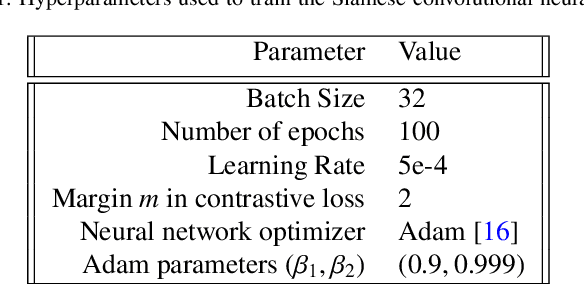
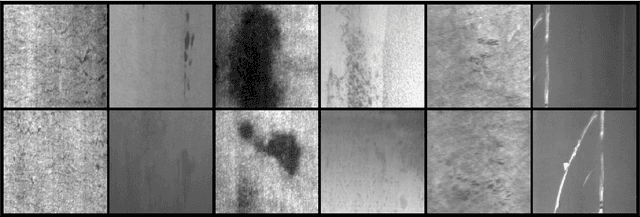
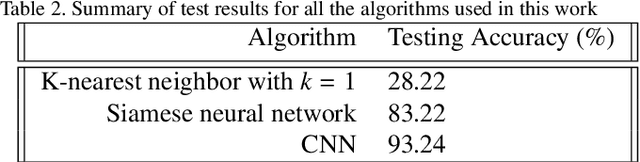
Quality control is an essential process in manufacturing to make the product defect-free as well as to meet customer needs. The automation of this process is important to maintain high quality along with the high manufacturing throughput. With recent developments in deep learning and computer vision technologies, it has become possible to detect various features from the images with near-human accuracy. However, many of these approaches are data intensive. Training and deployment of such a system on manufacturing floors may become expensive and time-consuming. The need for large amounts of training data is one of the limitations of the applicability of these approaches in real-world manufacturing systems. In this work, we propose the application of a Siamese convolutional neural network to do one-shot recognition for such a task. Our results demonstrate how one-shot learning can be used in quality control of steel by identification of defects on the steel surface. This method can significantly reduce the requirements of training data and can also be run in real-time.