 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDevelopmental Reinforcement Learning of Control Policy of a Quadcopter UAV with Thrust Vectoring Rotors
Jul 15, 2020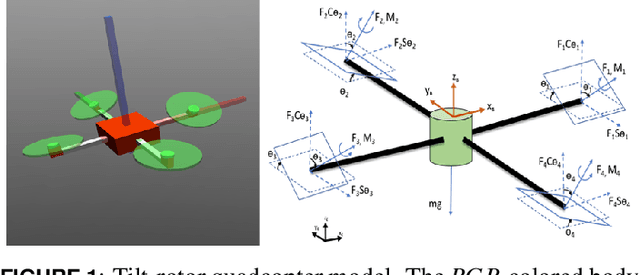
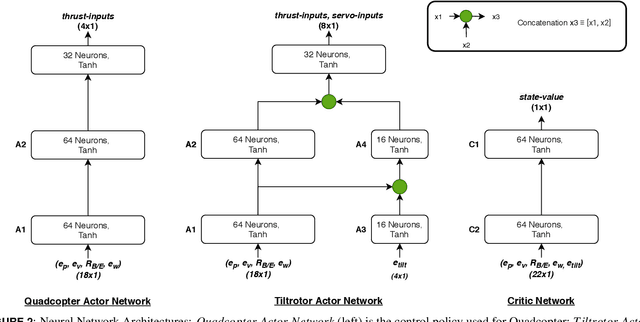
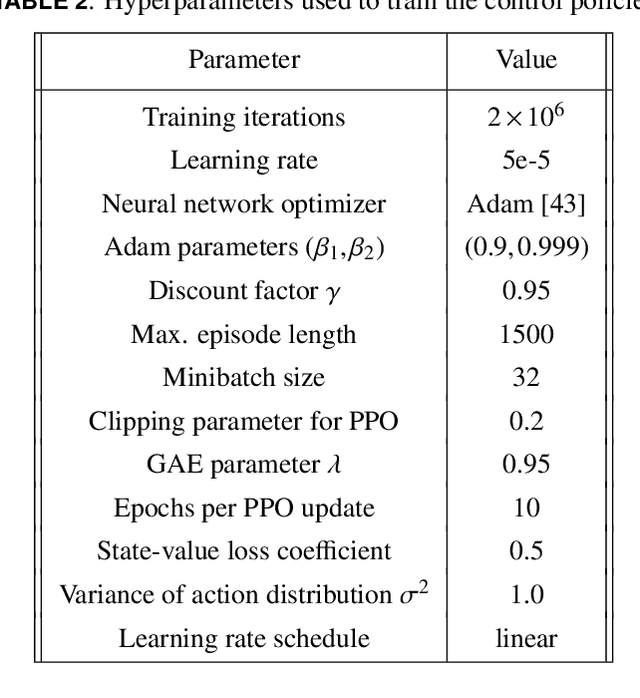
In this paper, we present a novel developmental reinforcement learning-based controller for a quadcopter with thrust vectoring capabilities. This multirotor UAV design has tilt-enabled rotors. It utilizes the rotor force magnitude and direction to achieve the desired state during flight. The control policy of this robot is learned using the policy transfer from the learned controller of the quadcopter (comparatively simple UAV design without thrust vectoring). This approach allows learning a control policy for systems with multiple inputs and multiple outputs. The performance of the learned policy is evaluated by physics-based simulations for the tasks of hovering and way-point navigation. The flight simulations utilize a flight controller based on reinforcement learning without any additional PID components. The results show faster learning with the presented approach as opposed to learning the control policy from scratch for this new UAV design created by modifications in a conventional quadcopter, i.e., the addition of more degrees of freedom (4-actuators in conventional quadcopter to 8-actuators in tilt-rotor quadcopter). We demonstrate the robustness of our learned policy by showing the recovery of the tilt-rotor platform in the simulation from various non-static initial conditions in order to reach a desired state. The developmental policy for the tilt-rotor UAV also showed superior fault tolerance when compared with the policy learned from the scratch. The results show the ability of the presented approach to bootstrap the learned behavior from a simpler system (lower-dimensional action-space) to a more complex robot (comparatively higher-dimensional action-space) and reach better performance faster.
Quaternion Feedback Based Autonomous Control of a Quadcopter UAV with Thrust Vectoring Rotors
Jun 28, 2020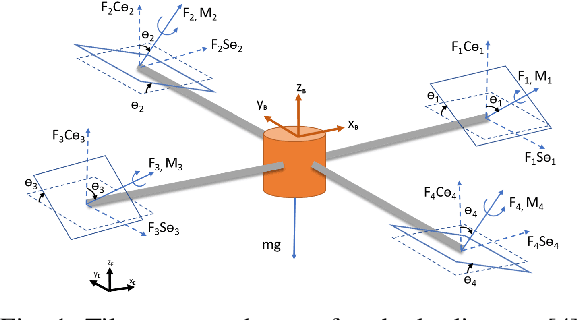

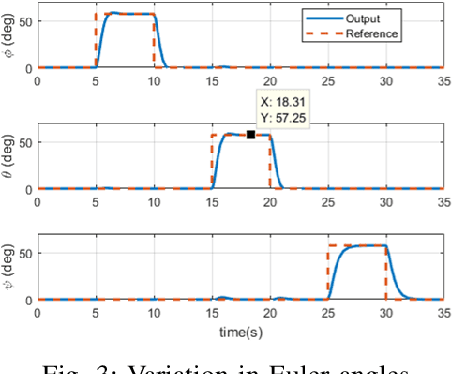
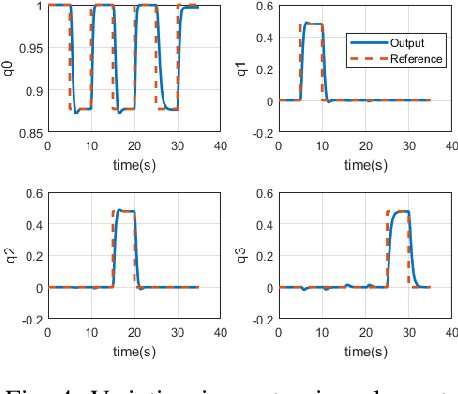
In this paper, we present an autonomous flight controller for a quadcopter with thrust vectoring capabilities. This UAV falls in the category of multirotors with tilt-motion enabled rotors. Since the vehicle considered is over-actuated in nature, the dynamics and control allocation have to be analysed carefully. Moreover, the possibility of hovering at large attitude maneuvers of this novel vehicle requires singularity-free attitude control. Hence, quaternion state feedback is utilized to compute the control commands for the UAV motors while avoiding the gimbal lock condition experienced by Euler angle based controllers. The quaternion implementation also reduces the overall complexity of state estimation due to absence of trigonometric parameters. The quadcopter dynamic model and state space is utilized to design the attitude controller and control allocation for the UAV. The control allocation, in particular, is derived by linearizing the system about hover condition. This mathematical method renders the control allocation more accurate than existing approaches. Lyapunov stability analysis of the attitude controller is shown to prove global stability. The quaternion feedback attitude controller is commanded by an outer position controller loop which generates rotor-tilt and desired quaternions commands for the system. The performance of the UAV is evaluated by numerical simulations for tracking attitude step commands and for following a way-point navigation mission.
Flight Control of Sliding Arm Quadcopter with Dynamic Structural Parameters
Apr 27, 2020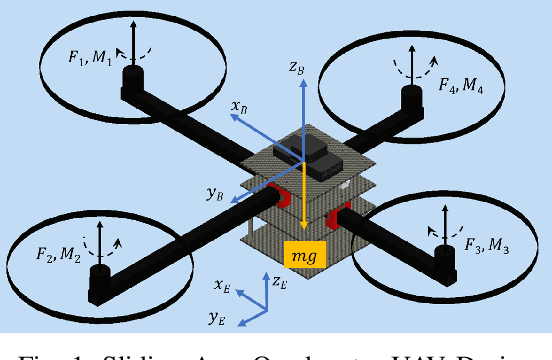
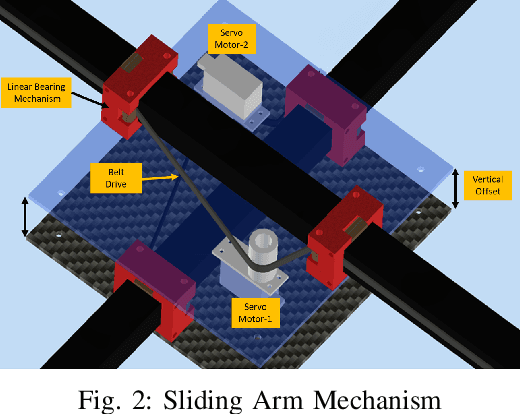
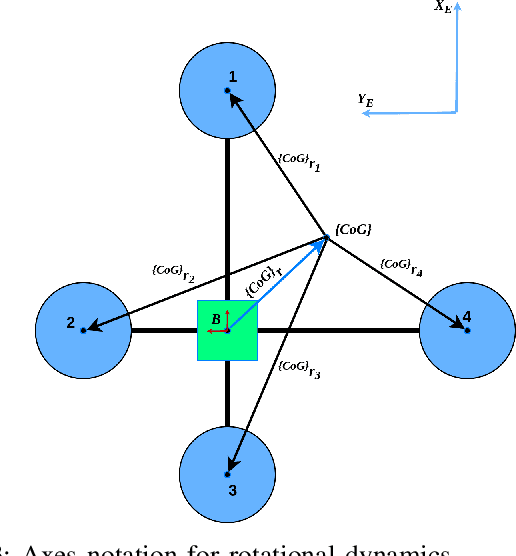
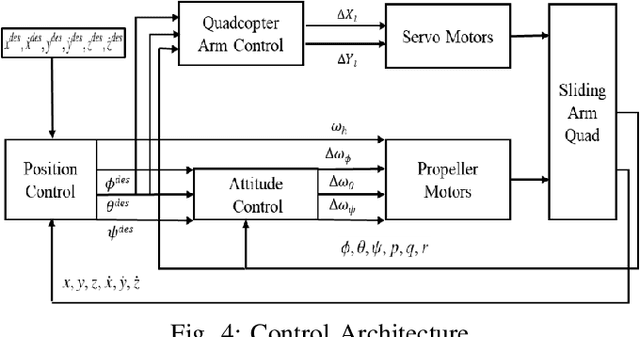
The conceptual design and flight controller of a novel kind of quadcopter are presented. This design is capable of morphing the shape of the UAV during flight to achieve position and attitude control. We consider a dynamic center of gravity (CoG) which causes continuous variation in a moment of inertia (MoI) parameters of the UAV in this design. These dynamic structural parameters play a vital role in the stability and control of the system. The length of quadcopter arms is a variable parameter, and it is actuated using attitude feedback-based control law. The MoI parameters are computed in real-time and incorporated in the equations of motion of the system. The UAV utilizes the angular motion of propellers and variable quadcopter arm lengths for position and navigation control. The movement space of the CoG is a design parameter and it is bounded by actuator limitations and stability requirements of the system. A detailed information on equations of motion, flight controller design and possible applications of this system are provided. Further, the proposed shape-changing UAV system is evaluated by comparative numerical simulations for way point navigation mission and complex trajectory tracking.